

Robot autonomous navigation system based on double single-line laser radars
A laser radar and navigation system technology, applied in the field of robotics, can solve the problems of insufficient scanning range, short effective distance, and large noise interference, etc., to improve autonomous mobility and obstacle avoidance effects, improve utilization, Ease of Deployment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The technical solutions of the present invention will be further introduced below in conjunction with the accompanying drawings and embodiments.
[0019] The first part introduces the principle of the technical solution:
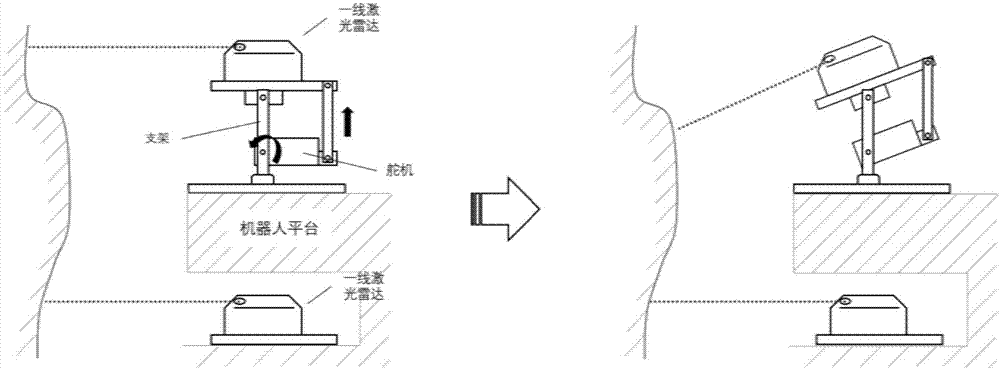
[0020] 1. Use two first-line laser radars and peripheral control circuits to form a dual-line radar system to collect environmental data. Such as figure 1 As shown, the two lidars are installed in different ways, one of which is fixed horizontally to obtain the plane outline of the space where the robot is located. The other radar scans up and down under the control of the radar controller powered by the steering gear 1, and the radar controller sends the angle information between the current radar scanning plane and the horizontal plane to the data processing system.
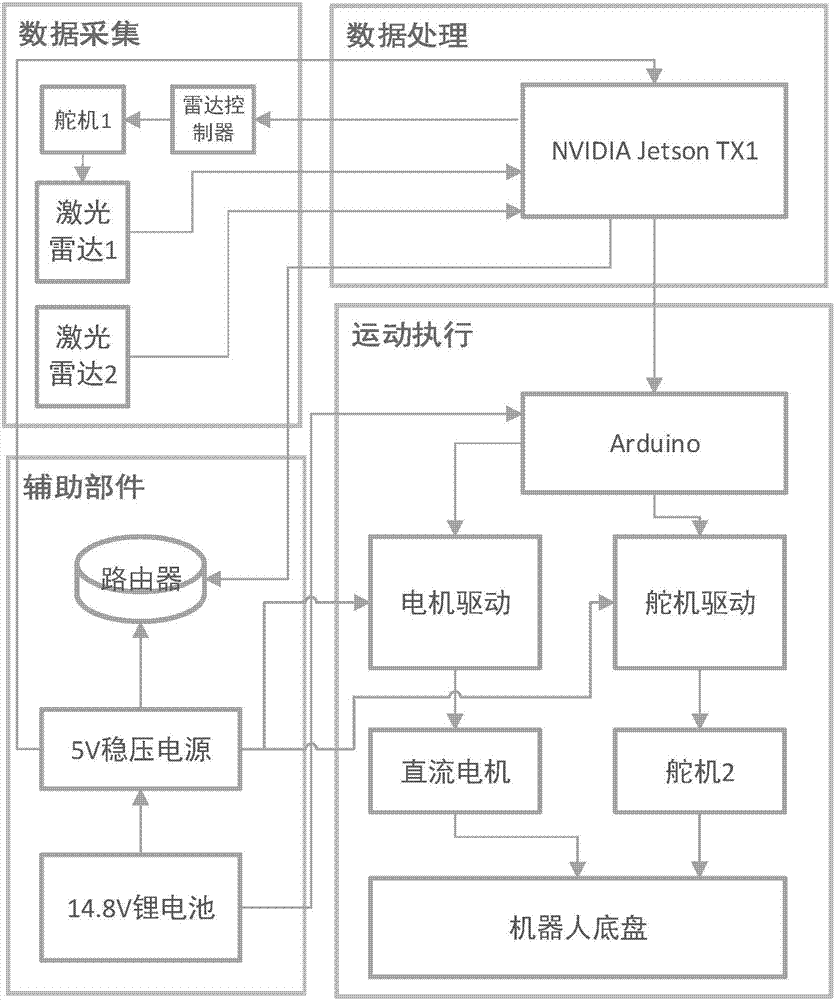
[0021] 2. Use the NVIDIA Jetson TX1 embedded platform as the core controller to build a robot hardware platform. The whole platform can be divided into four main parts according to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More