

Autonomous navigation mobile robot and its operation method
A mobile robot and autonomous navigation technology, applied in the field of mobile robots, can solve the problems of inflexible line adjustment and poor scalability, and achieve low maintenance costs, interactive interaction, and wide application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to enable those skilled in the art to better understand the technical solution of the present invention, the technical solution of the present invention will be clearly and completely described below in conjunction with the accompanying drawings of the present invention.
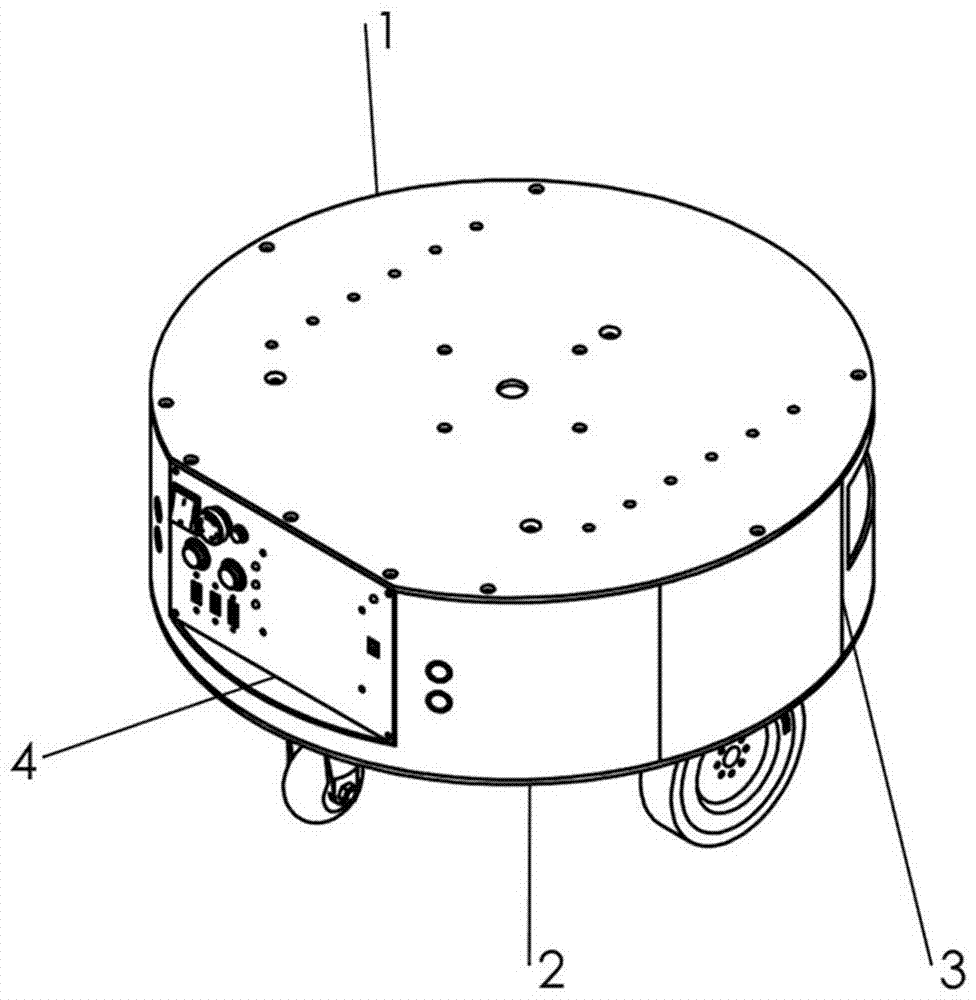
[0026] Such as figure 1 As shown, the chassis frame of the robot is composed of a top plate 1, a bottom plate 2 and a surrounding plate 3 fixedly installed between the two, and the operation control panel 4 is fixed at one end of the surrounding plate.
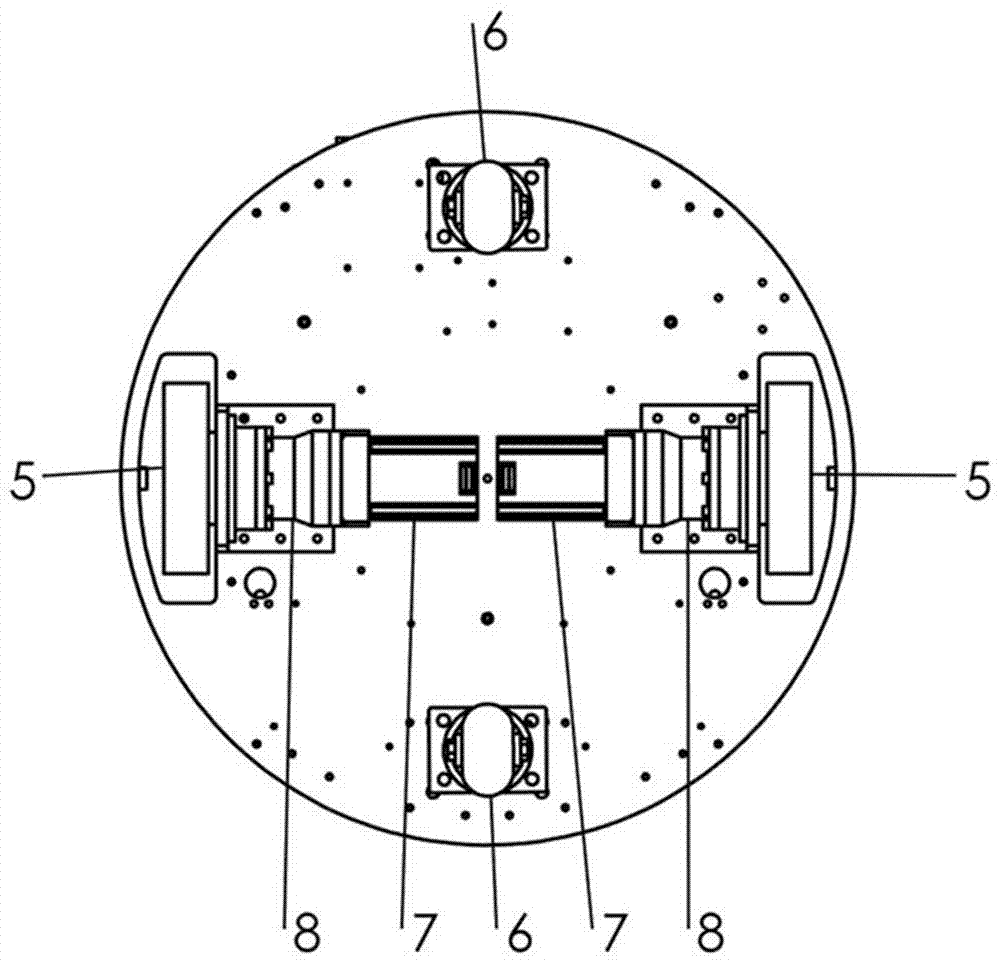
[0027] Such as figure 2 and Figure 5 As shown, the driving system includes a driving wheel 5, a universal wheel 6, a DC motor 7, a motor reducer 8 and a motor driver 25, and the DC motor 7 is connected with the motor reducer 8 for outputting a larger torque. The motor reducer 8 is connected with the drive wheel 5, and the drive wheel 5 rotates with the rotation of the motor reducer 8. The base plate 2 is provided with a support column 34, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More