

Multi-robot control synchronization system and method based on distributed clocks
A distributed control and controller technology, applied in time division multiplexing systems, multiplexing communications, electrical components, etc., to reduce complexity, improve network bandwidth utilization, and reduce jitter
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
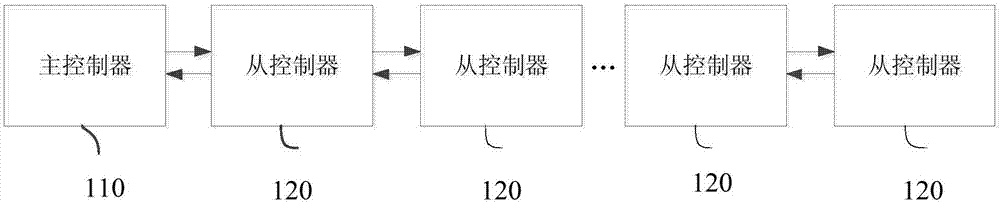
[0046] figure 1 Shown is a schematic diagram of a distributed control system provided by an embodiment of the present invention. Such as figure 1 As shown, the distributed control system provided by the present invention adopts a master-slave communication mode, including a master controller 110 and a plurality of slave controllers 120, and a cascaded network is used between the master controller 110 and a plurality of slave controllers 120 to connect chrysanthemu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More