

Body gravity center displacement correction-based six-foot robot joint angle calibration method
A hexapod robot and joint angle technology, applied in the field of robotics, can solve the problems of increasing operational complexity, cost, and additional investment, achieving high precision, real-time performance, and guaranteed accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
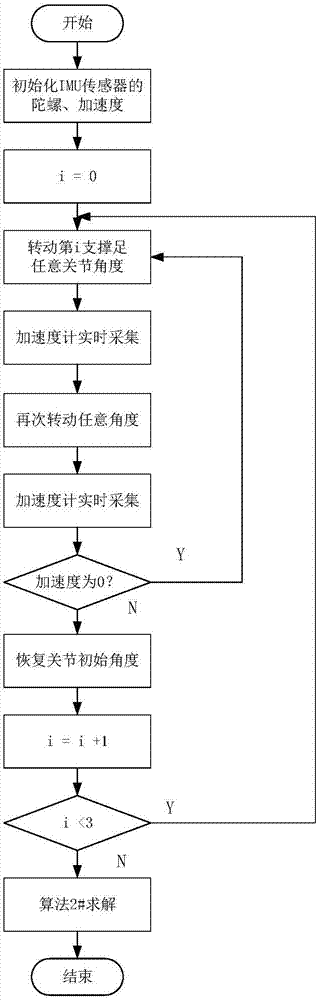
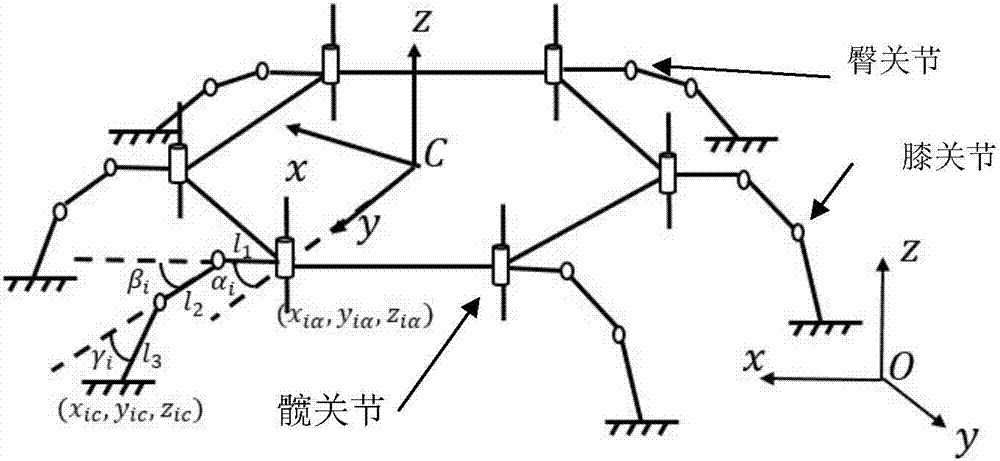
[0030] Such as figure 1 As shown, a hexapod robot joint angle calibration method based on the body center of gravity displacement correction, the method is aimed at the hexapod robot, the six mechanical feet with the same structure are arranged rotationally symmetrically around the regular hexagonal body, with Any three legs support the ground, and the other three legs lift up and keep not touching the ground at all times.
[0031] The method comprises the steps of:
[0032] Step 1. Initialize t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More