

Upper limb rehabilitation robot with active-passive type two arms
A rehabilitation robot, active and passive technology, applied in the field of rehabilitation training robots, can solve the problems of only one-dimensional or two-dimensional movement, only support a single joint or part of joints, single-arm passive movement, etc., to stimulate interest and enthusiasm, Meet the needs of sports and improve the scientific effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
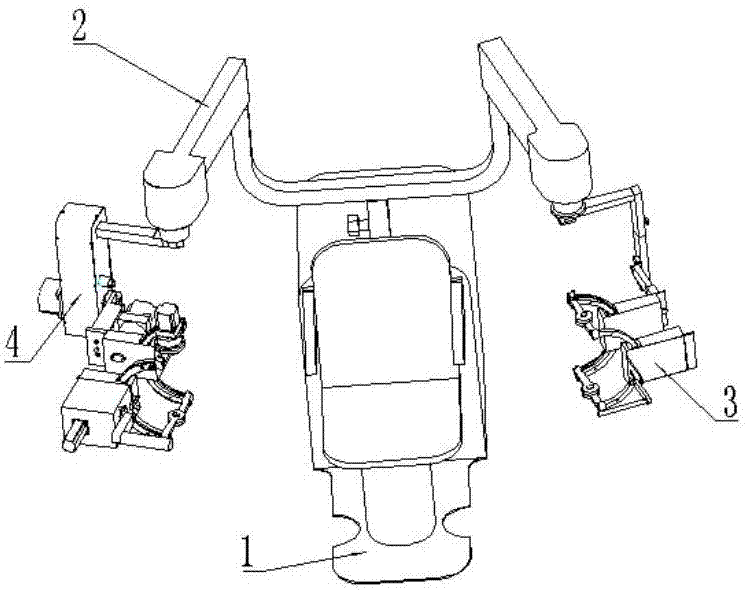
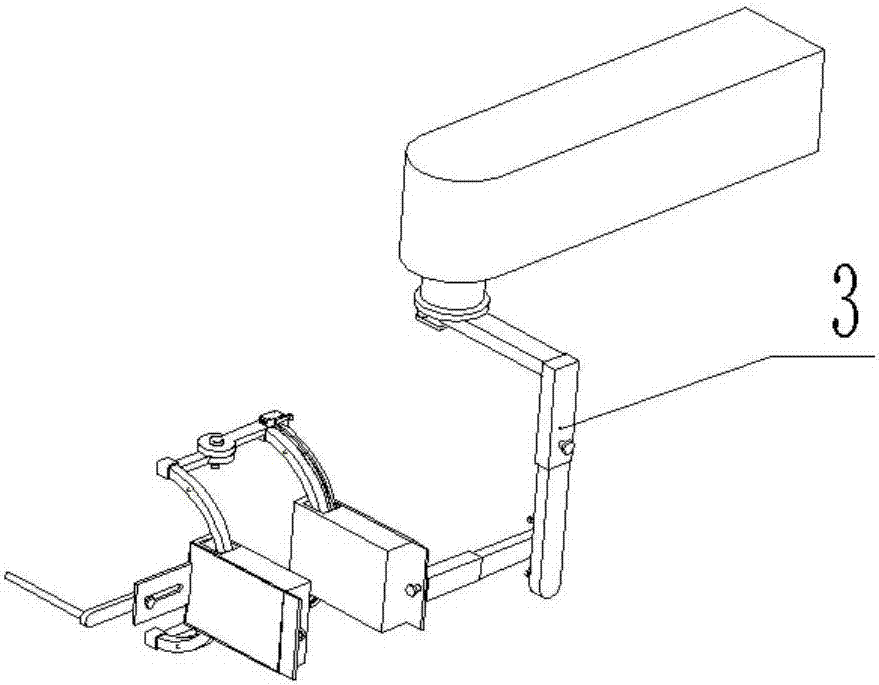
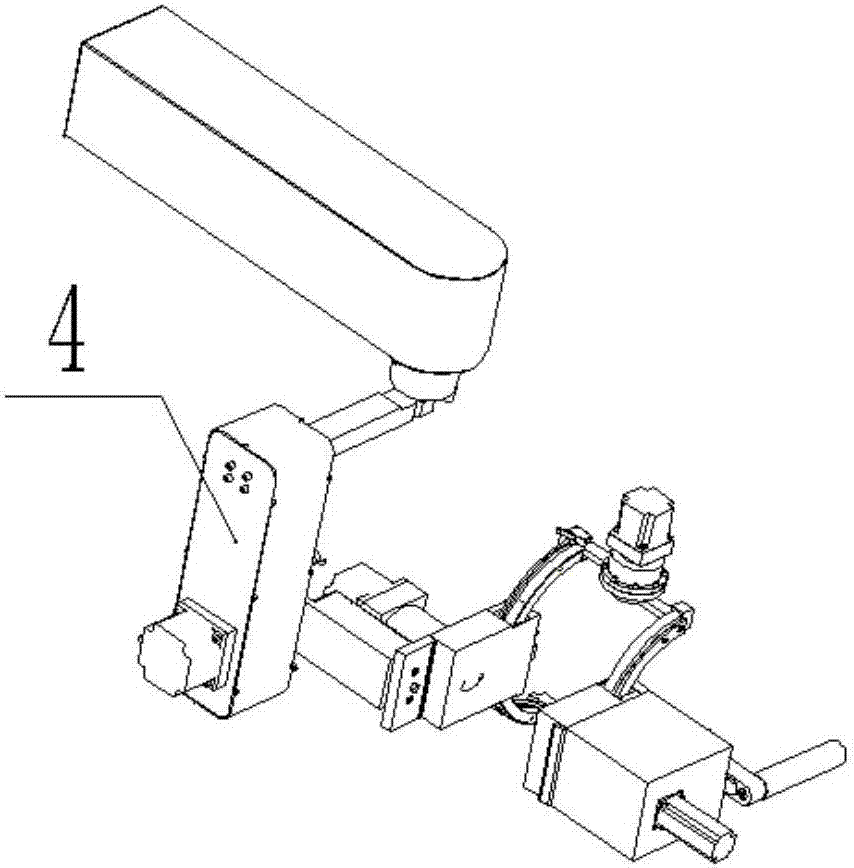
[0022] The invention provides an active and passive dual-arm upper limb rehabilitation robot, such as Figure 1 to Figure 9 As shown, it includes upper limb active training device 3, upper limb passive training device 4, cantilever arm 2 and base 1, wherein:
[0023] The upper limb active training device 3 and the upper limb passive training device 4 are fixed on the base 1 through the cantilever arm 2;
[0024] The upper limb active training device 3 includes active shoulder joint abduction and adduction components, active shoulder joint flexion and extension components, active upper arm internal and external rotation components, active elbow flexion and extension components, active forearm internal and external rotation components, and active wrist joi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More