

Minitype haptic rendering method based on active and passive devices
A passive device, tactile reproduction technology, applied in tactile transmission signal systems, instruments, computer parts, etc., can solve the problems of high energy density, small torque/volume ratio, and inability to accurately control magnetorheological dampers. Improve fidelity and immersion, large torque/volume ratio, and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
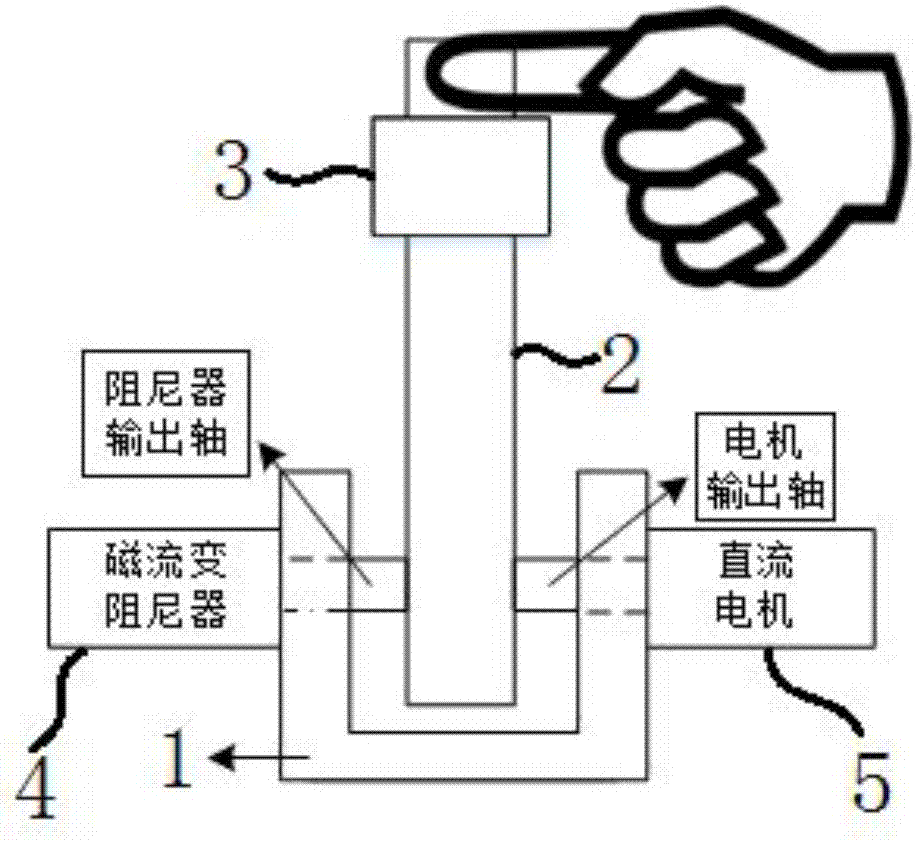
[0027] Such as figure 1 As shown, the force haptic reproduction device includes a bracket 1, an actuator fixed on both sides of the bracket 1, a force haptic transmission device 2 connected with the output shaft of the actuator, and a force / torque sensor 3 provided at the end of the force haptic transmission device 2, The force / torque sensor is used to measure the actual force / torque to form a feedback loop; the actuator is composed of a magnetorheological damper 4 and a DC motor 5, the output shaft of the DC motor and the output shaft of the magnetorheological damper Connected.
[0028] A high-precision and small-scale force tactile reproduction method based on active / passive devices, the specific steps are as follows:
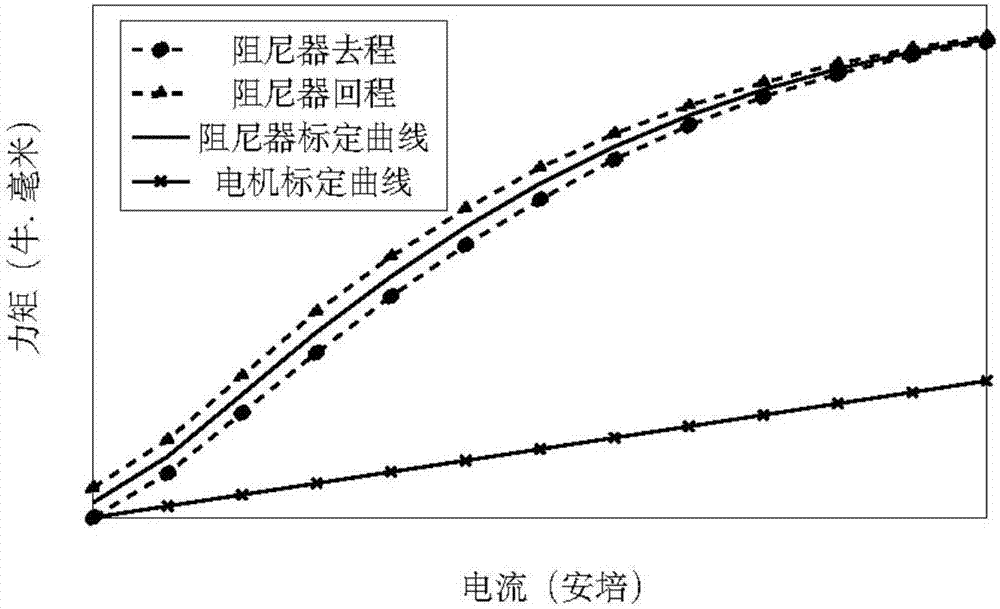
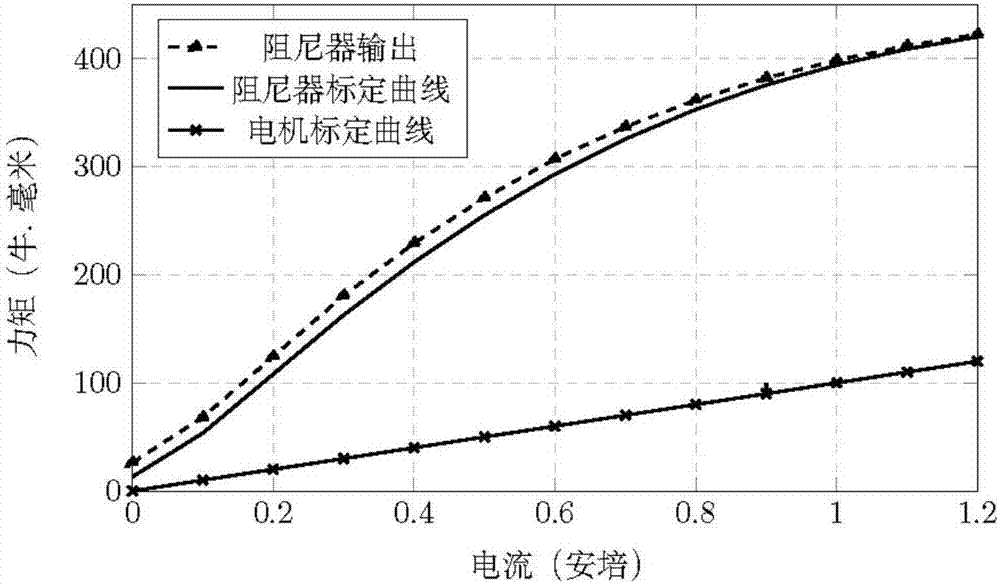
[0029] Step (A): Construct the above-mentioned equipment, calibrate the magnetorheological damper and DC motor, and obtain the relationship between the input current and output torque; the magnetorheological damper is made of ferromagnetic materials, One of the i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More