

KINECT-based multi-finger real-time tracking method
A real-time tracking and multi-finger technology, applied in the input/output process of data processing, input/output of user/computer interaction, image data processing, etc., can solve problems such as robustness, and achieve fast response speed and system stability High effect with high user experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described below in conjunction with the accompanying drawings.
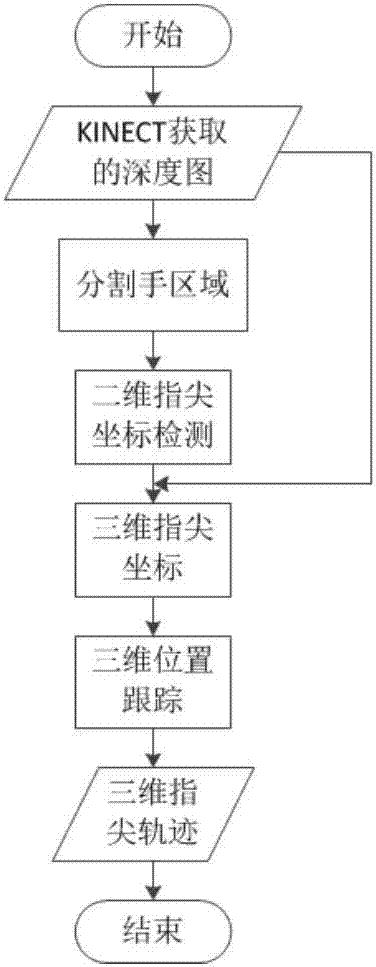
[0055] Such as figure 1 Shown, a kind of multi-finger real-time tracking method based on KINECT comprises the following steps:
[0056] Step 1: Obtain the depth image of the person with KINECT;
[0057] Step 2: Segment the hand area;
[0058] Step 3: Detect the two-dimensional fingertip position;
[0059] Step 4: Obtain the three-dimensional fingertip position;
[0060] Step 5: Track the three-dimensional fingertip position to obtain its motion trajectory.
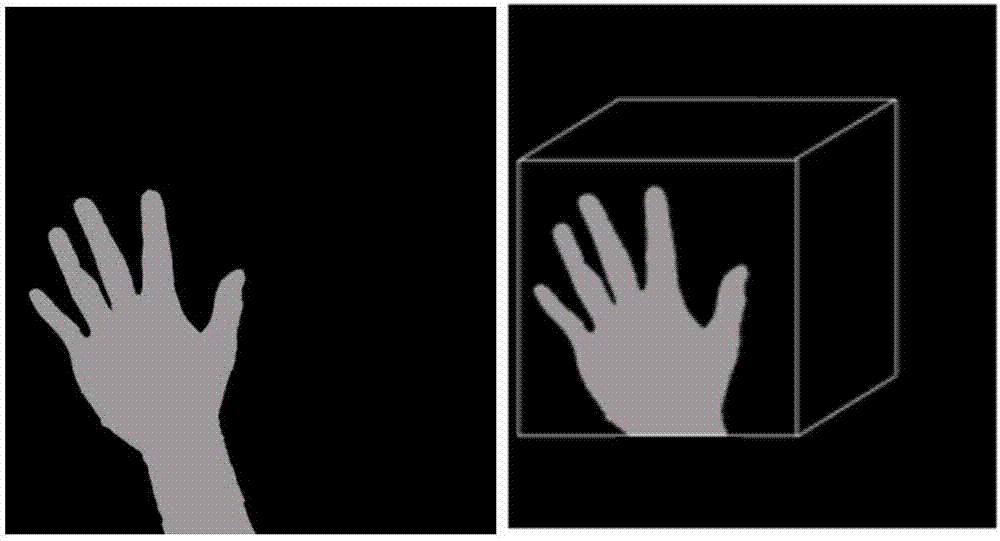
[0061] Such as figure 2 As shown, after KINECT acquires the depth image, the hand area is segmented in a boxed manner. The hand region segmentation includes the following steps:
[0062] 2a: Use the NITE library to track the center point position of the hand, and then extract the depth hand area according to the depth coordinates of the center point:
[0063]
[0064] Among them, Z hand Represents the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More