

Positioning method based on arrival time of unknown starting time in non-line-of-sight environment
A technology of starting time and positioning method, which is applied in the field of target positioning and can solve problems such as difficult application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The present invention will be described in further detail below in conjunction with the embodiments of the drawings.
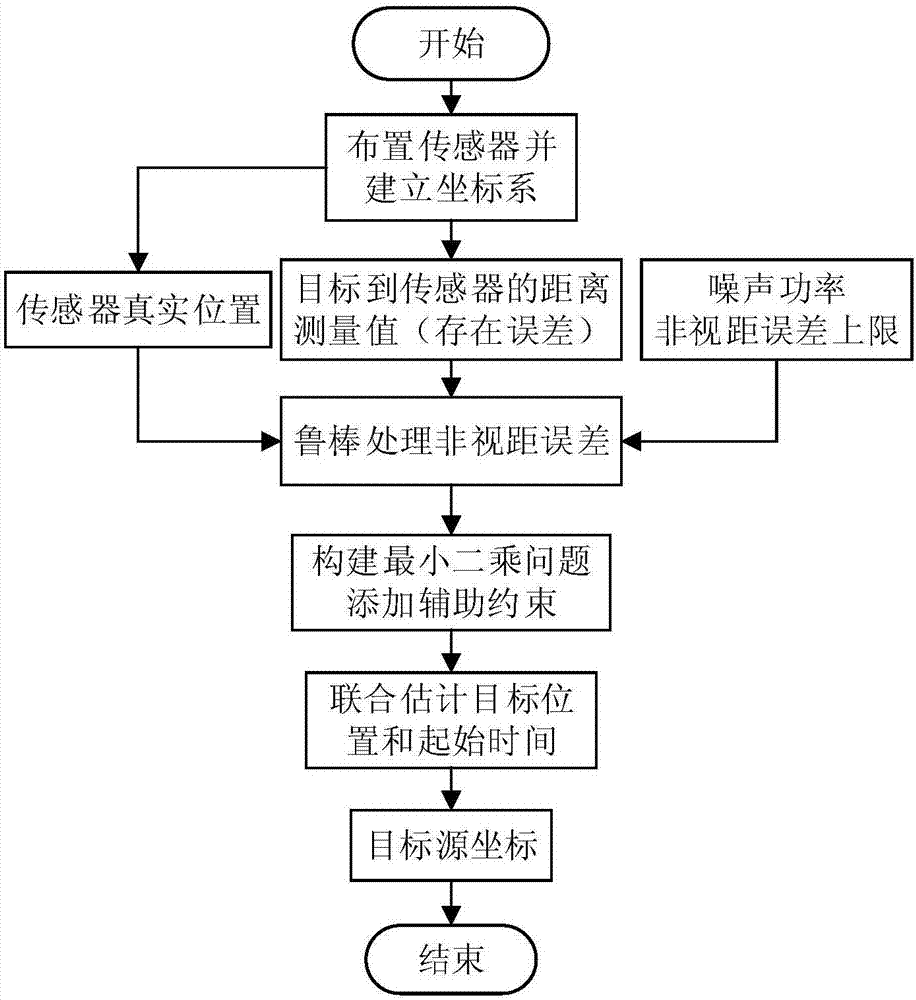
[0073] The present invention proposes a positioning method based on arrival time with unknown starting time in a non-line-of-sight environment, and its overall flow diagram is as follows figure 2 As shown, it includes the following steps:
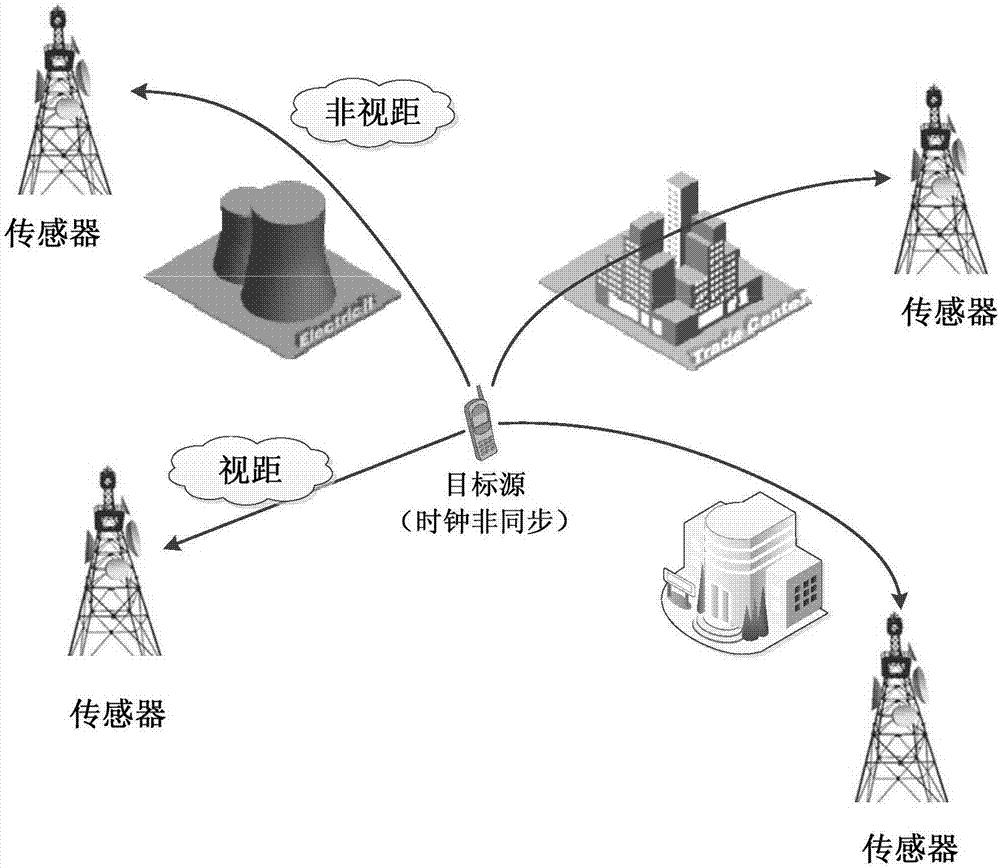
[0074] ① Establish a plane coordinate system or space coordinate system as the reference coordinate system in the wireless sensor network; set the wireless sensor network to have a target source for transmitting measurement signals and N sensors for receiving measurement signals, and set The clocks of the N sensors are synchronized, and the clock of the target source is not synchronized with the clock of the sensor; the coordinate position of the N sensors in the reference coordinate system is correspondingly recorded as s 1 ,...,S N , Denote the coordinate position of the target source in the reference coordinate system ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More