

Unsignalized intersection vehicle self-collaborative passing method based on position sharing
A technology of intersections and vehicles, applied in the field of coordinated operation of self-driving cars, can solve problems such as large amount of computation, achieve the effects of reducing operation steps, ensuring timeliness, and avoiding potential safety hazards
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0028] A self-coordinated vehicle passing method at a non-signal-controlled intersection based on location sharing, including the following steps:
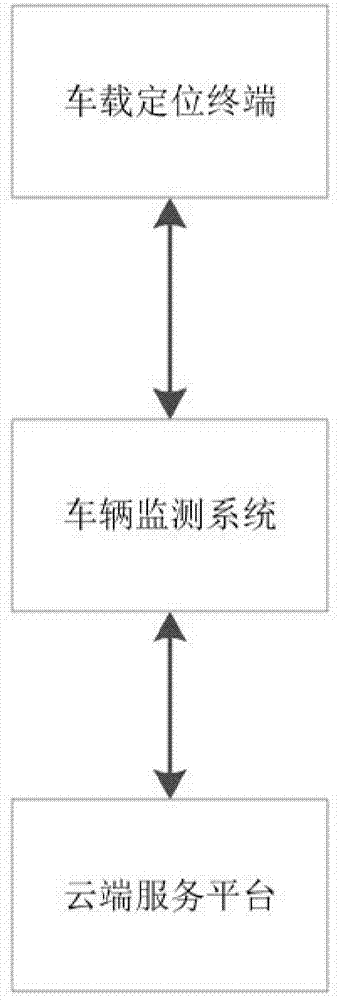
[0029] Positioning step: Configure a vehicle monitoring system at the intersection without signal control, and install a vehicle-mounted positioning terminal on the vehicle. The vehicle-mounted positioning terminal is used to realize real-time positioning of the vehicle's position and running track through satellites and communication networks. The vehicle-mounted positioning terminal can use the terminal positioned by the Beidou system. The refresh rate of the existing Beidou module is generally 1Hz. In order to ensure the accuracy, the Beidou module that can reach 50Hz is selected in this implementation. For the vehicle monitoring system, we choose a PC with an i7 processor, which is equipped with a wireless network card.
[0030] Intersection network establishment steps: When a vehicle enters the monitoring area of the vehic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More