

A Structurally Redundant Parallel Robot Mechanism with Four Relative Degrees of Freedom
A degree of freedom, robot technology, applied in the field of robots, can solve the problems of difficult production and processing, complex structure, restricting the application of the mechanism, etc., to achieve the effect of easy production and processing, and simple mechanism structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described in conjunction with the accompanying drawings.
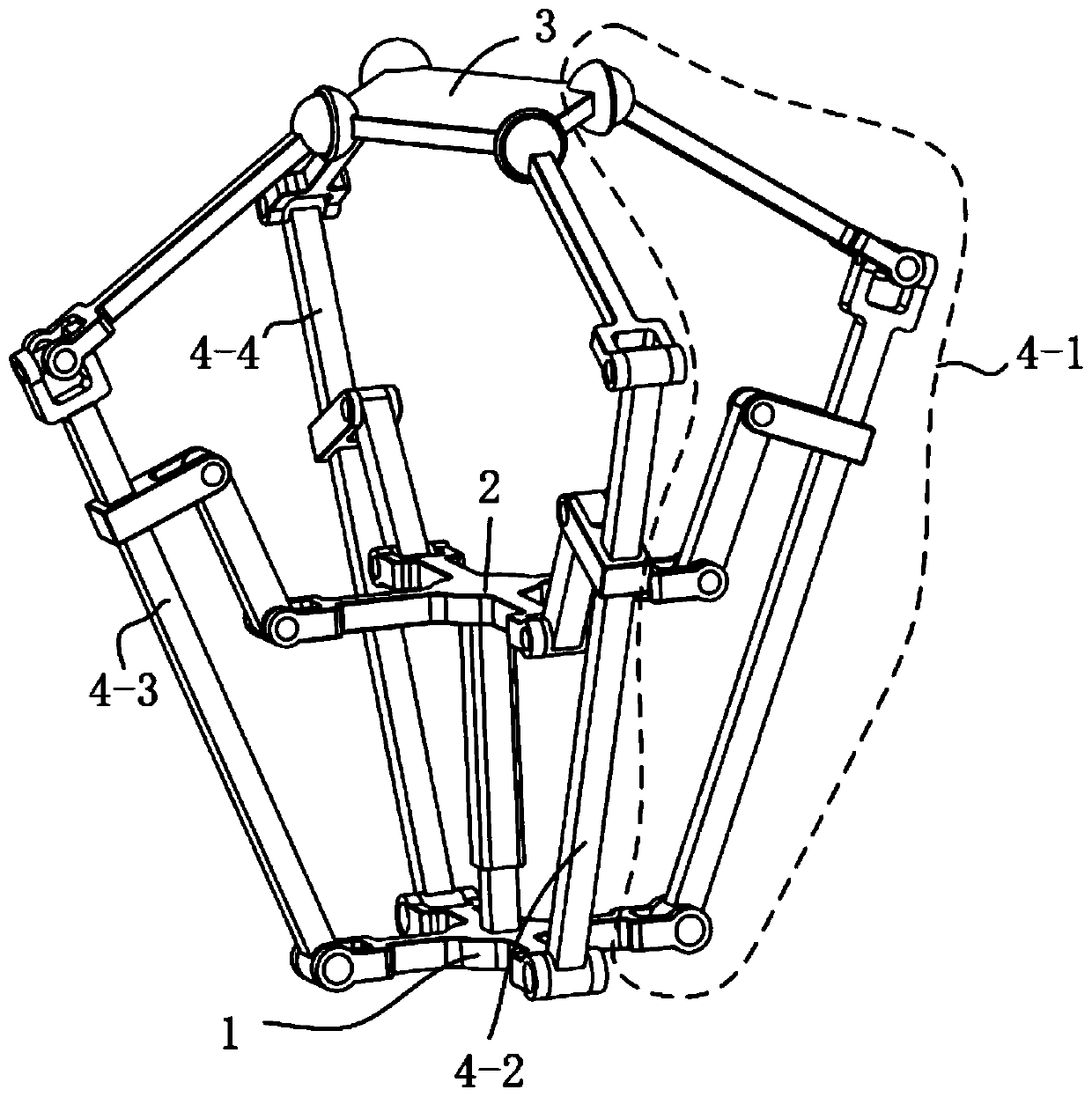
[0026] A structurally redundant parallel robot mechanism with four relative degrees of freedom, the parallel robot mechanism includes: a base 1, an intermediate platform 2, a moving platform 3, a first branch chain component 4-1, and a second branch chain component 4-2 , the third branch chain component 4-3, the fourth branch chain component 4-4.
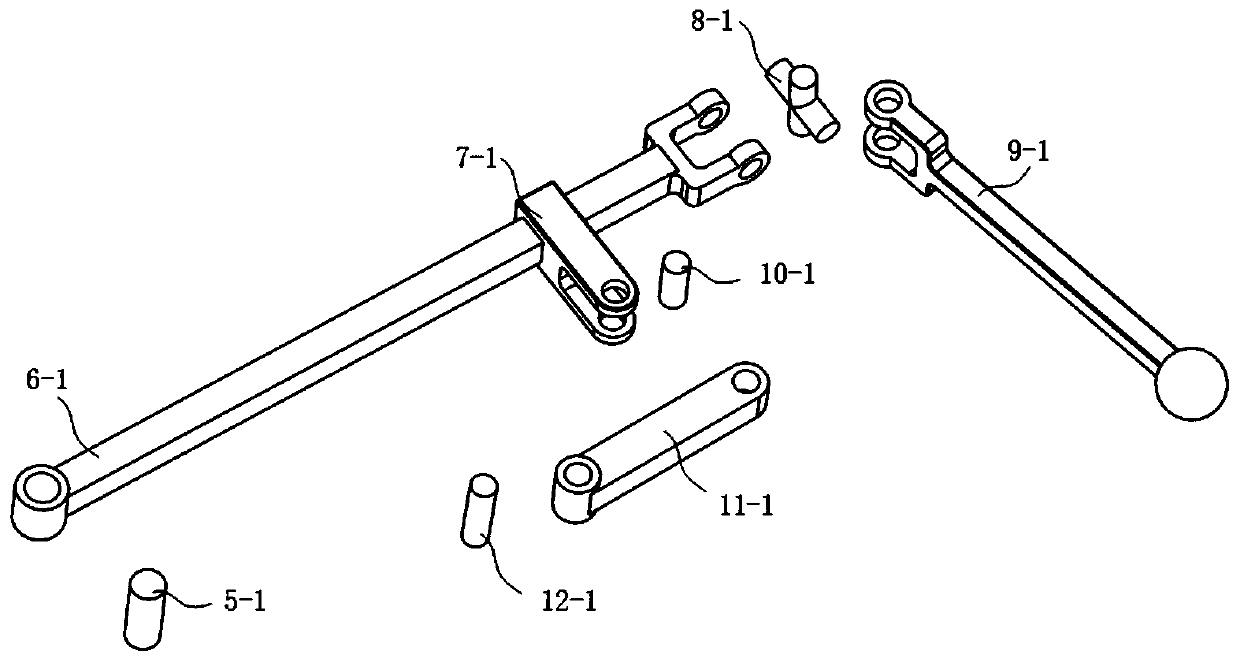
[0027] This mechanism connects the base 1, the middle platform 2 and the moving platform 3 through the first branch chain assembly 4-1, the second branch chain assembly 4-2, the third branch chain assembly 4-3 and the fourth branch chain assembly 4-4. Connection structure: the chute of the intermediate platform 2 and one end of the base 1 form a moving pair, and the circular hole end of the first link rod 6-1 of the first branch chain assembly 4-1 and the base 1 pass through the first bolt 5 -1 is connected to form a rotating pai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More