

TOF (Time of Flight)-based optical flow positioning system
A positioning system and optical flow technology, applied in the field of TOF-based optical flow positioning system, can solve the problems of less collected samples, cumulative errors, poor ranging accuracy, etc., to overcome rapid changes in height, fast three-dimensional positioning, high pixel The effect of level precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The technical solutions proposed by the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. Advantages and features of the present invention will be apparent from the following description and claims. It should be noted that all the drawings are in very simplified form and use imprecise ratios, which are only used for the purpose of conveniently and clearly assisting in describing the embodiments of the present invention.
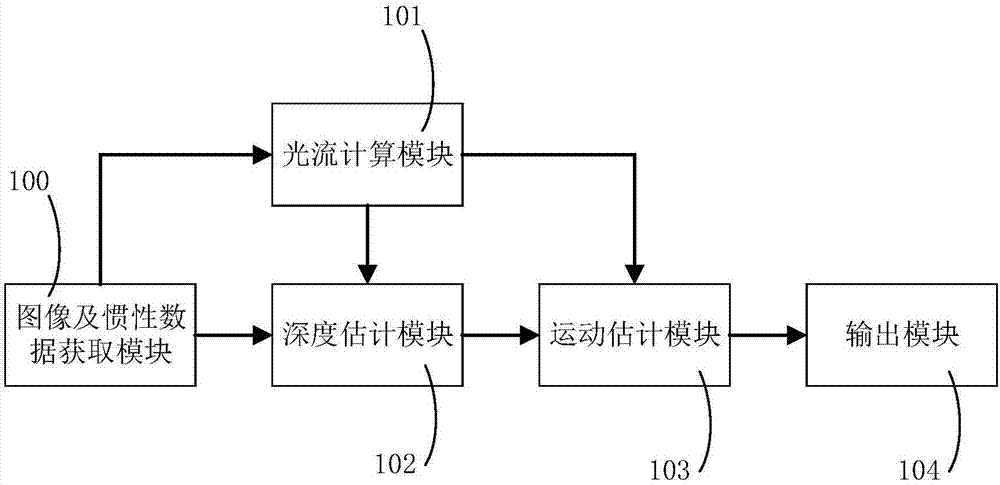
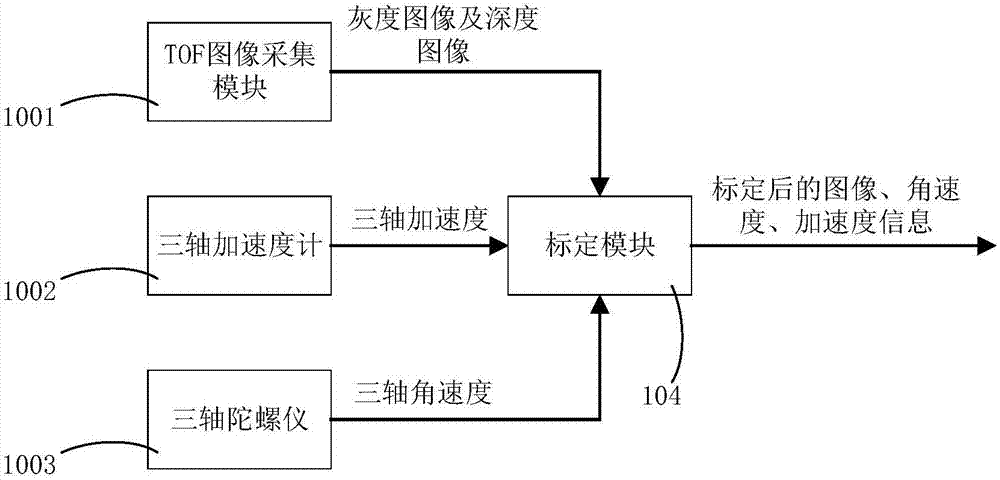
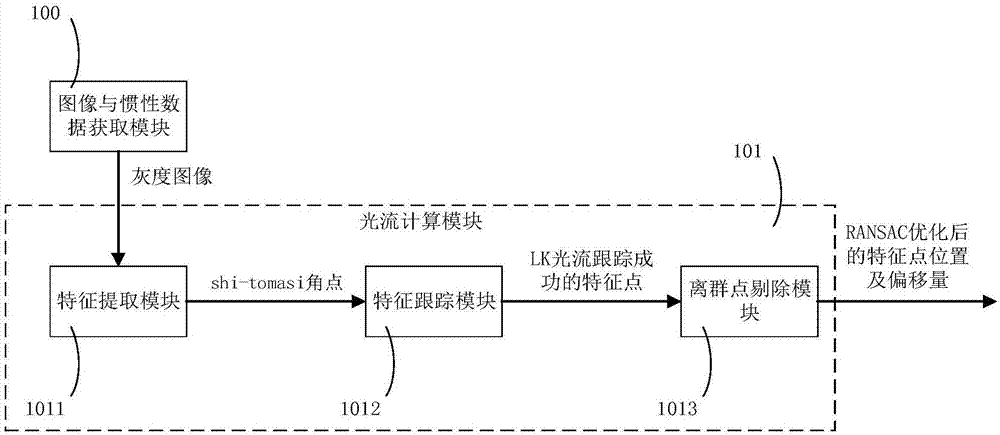
[0033] The present invention is aimed at various problems that may occur in the existing optical flow positioning scheme that uses ultrasonic ranging and camera image acquisition for positioning methods. The TOF camera is applied to the optical flow positioning technology, and the grayscale obtained by the TOF image acquisition module The optical flow calculation module and the depth estimation module are used to obtain the feature point information and depth estimation i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More