Automatic lane changing layered control system and method of intelligent electric automobile
A technology of intelligent electric vehicles and hierarchical control systems, applied in the direction of control devices, vehicle components, external condition input parameters, etc., can solve problems such as large amount of calculation, difficult to meet the real-time requirements of automatic lane change control system, and achieve guaranteed Robustness and real-time performance, comfortable and comprehensive driving performance, and effects of improving safety and real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Combine below Figure 1~5 The intelligent electric vehicle automatic lane change control system and method of the present invention will be further described in detail.
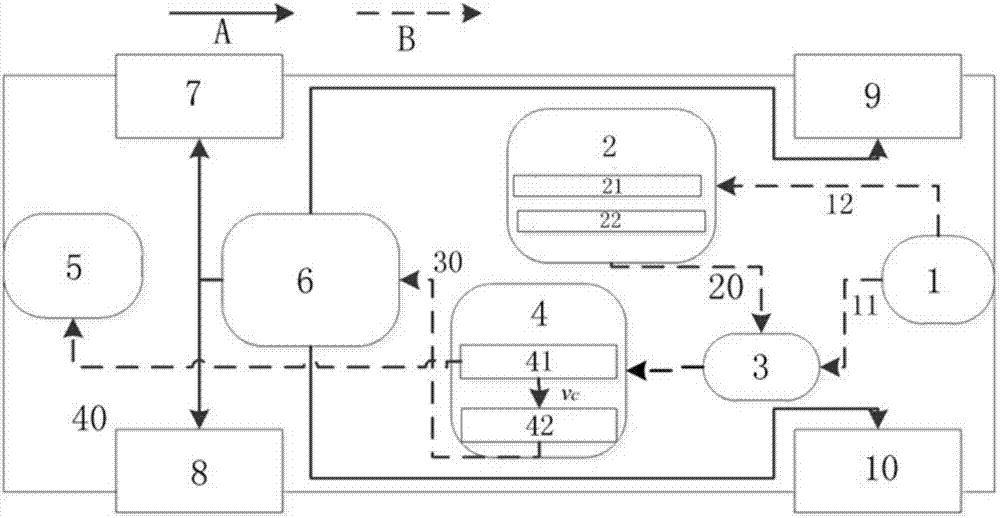
[0029] The intelligent electric vehicle automatic lane-changing layered control system includes two aspects of lane-changing trajectory planning and lane-changing trajectory tracking. It includes a lane-changing trajectory planning module 2 , a lane-changing trajectory tracking module 4 , a deviation estimation module 3 , a data acquisition module 1 , a motor module 6 , and a steering module 5 . The present invention first collects the information of the vehicle itself and its surrounding environment through the on-board data acquisition module, uses polynomial fitting to obtain the expected lane-changing trajectory, and then designs the upper-level controller 41 of the lane-changing trajectory based on the Lyapunov theory to obtain the expected vehicle speed and front wheel angle, and according to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com