

Autonomous type mine detection robot system and mine detection method
A robotic system and autonomous technology, applied in the field of mine detection, can solve the problems of limited detection range of mine detection vehicles, low mine detection efficiency, high data update rate, etc., so as to improve operation efficiency and communication speed, and improve mine detection efficiency. , to ensure the effect of position accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
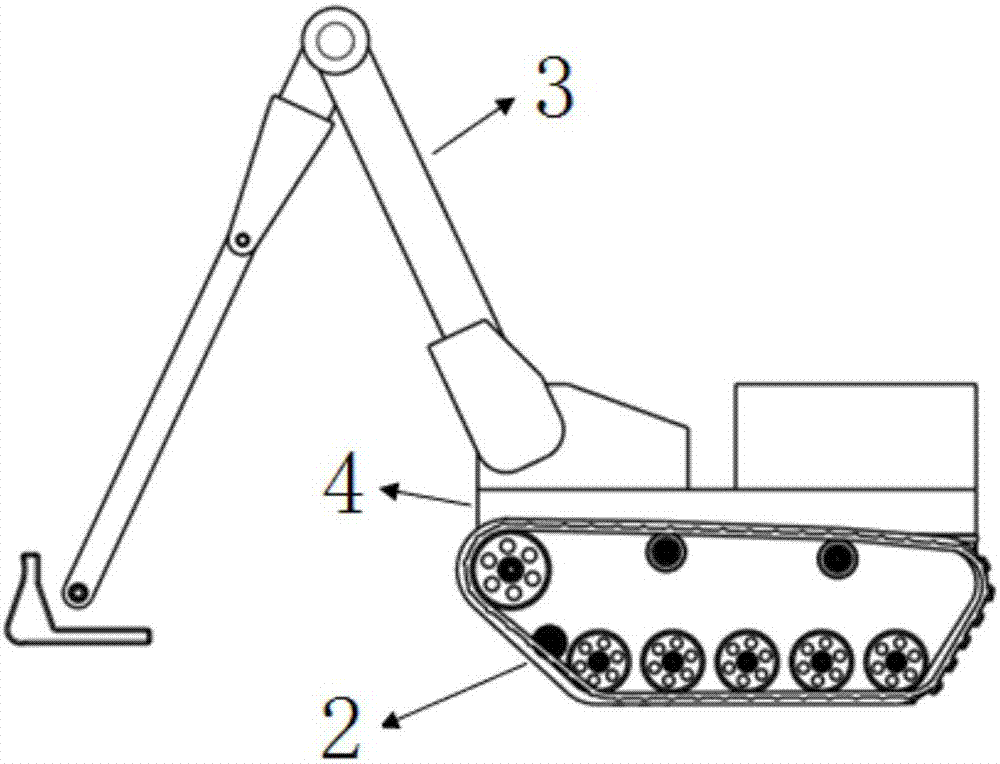
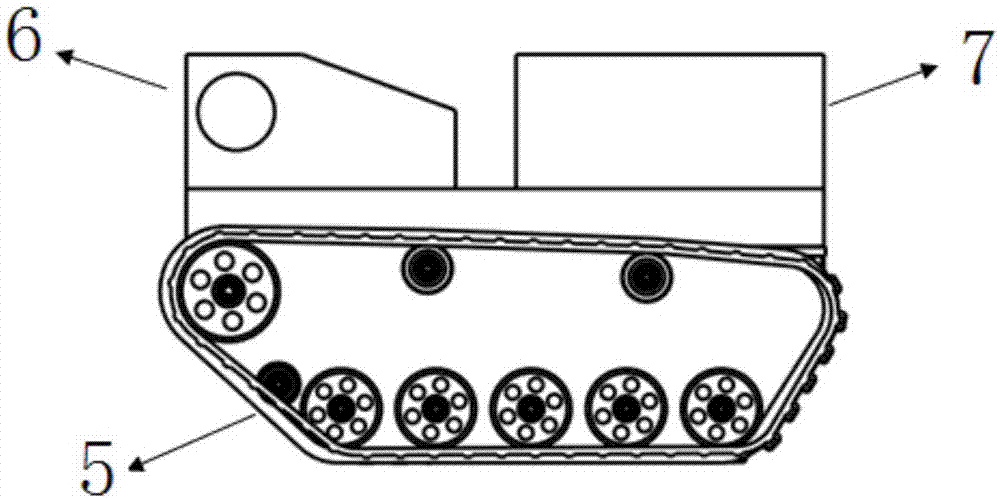
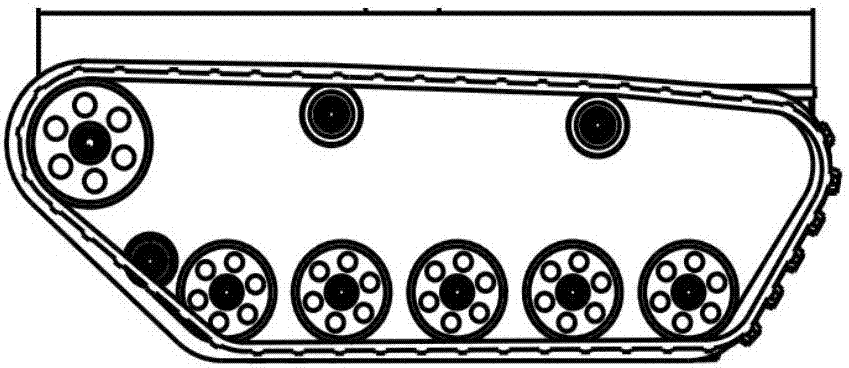
[0079] Embodiment 1 of the present invention: an autonomous mine detection robot system, such as figure 1 As shown, the vehicle body is included, and the vehicle body is provided with a mobile chassis system 2, a mechanical arm detection system 3 and a spraying system 4, and the mobile chassis system 2 is connected with the mechanical arm detection system 3 and the spraying system 4 respectively; figure 2 As shown, the mobile chassis system 2 includes a mobile platform system 5, a power system 6 and a control system 7, such as Figure 7 , Figure 9 As shown, the manipulator detection system 3 includes a manipulator motion system 8 and a detection system 9, wherein the power system 6 is installed at the rear end of the mobile platform system 5 to provide a power source for the entire device and to be used as a counterweight; the control system 7 is connected to The power system 6 , the mechanical arm movement system 8 and the detection system 9 ; the detection system 9 is arr...
Embodiment 2
[0080] Embodiment 2: An autonomous mine detection robot system, including a car body, the car body is provided with a mobile chassis system 2, a mechanical arm detection system 3 and a spraying system 4, and the mobile chassis system 2 is connected with the mechanical arm detection system 3 respectively. Connected to the spraying system 4; the mobile chassis system 2 includes a mobile platform system 5, a power system 6 and a control system 7, and the mechanical arm detection system 3 includes a mechanical arm motion system 8 and a detection system 9, wherein the power system 6 is installed on The rear end of the mobile platform system 5 provides the power source for the whole device and is used as a counterweight; the control system 7 is respectively connected to the power system 6, the mechanical arm movement system 8 and the detection system 9; the detection system 9 is located at the front end of the mechanical arm movement system 8 . It also includes an intelligent contro...
Embodiment 3
[0081] Embodiment 3: An autonomous mine detection robot system, including a car body, the car body is provided with a mobile chassis system 2, a mechanical arm detection system 3 and a spraying system 4, and the mobile chassis system 2 is connected with the mechanical arm detection system 3 respectively. Connected to the spraying system 4; the mobile chassis system 2 includes a mobile platform system 5, a power system 6 and a control system 7, and the mechanical arm detection system 3 includes a mechanical arm motion system 8 and a detection system 9, wherein the power system 6 is installed on The rear end of the mobile platform system 5 provides the power source for the whole device and is used as a counterweight; the control system 7 is respectively connected to the power system 6, the mechanical arm movement system 8 and the detection system 9; the detection system 9 is located at the front end of the mechanical arm movement system 8 . The mechanical arm motion system 8 ado...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More