

Underwater video shooting system
A technology of underwater photography and camera, applied in the field of robotics, to achieve the effect of three-dimensional realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
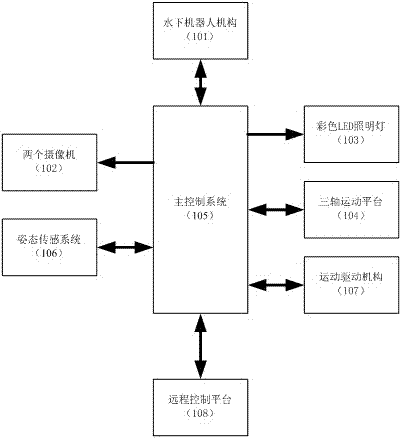
[0021] Such as figure 1 As shown, the underwater camera system includes: an underwater robot mechanism (101), two cameras (102), a colored LED lighting lamp (103), a three-axis motion platform (104), a main control system ( 105), an attitude sensing system (106), a motion drive mechanism (107) and a remote control platform (108), characterized in that two cameras (102), Colored LED lighting (103), three-axis motion platform (104), main control system (105), attitude sensing system (106) and motion drive mechanism (107), the main control system (105) communicates with the remote The control platform (108) is connected to realize real-time remote control and image data transmission control, and the main control system (105) is connected with the two cameras (102), the color LED lighting (103), and the three-axis motion platform respectively. (104), the attitude sensing system (106) is connected with the motion driving mechanism (107), and is used to realize the motion control o...
Embodiment 2
[0023] This embodiment is basically the same as Embodiment 1, especially in that:
[0024] The two cameras (102) are combined to form an underwater binocular camera system, which can realize the stereo camera function and photographing function of underwater images, and obtain the depth information of the captured images.
[0025] The color LED lighting lamp (103) adopts four high-power controllable LEDs of white, red, green and blue to form a color variable lighting LED array, which is used to realize the changeable and adjustable color lighting of the underwater environment background.
[0026] The three-axis motion platform (104) is used to fix the two cameras (102), and is used to realize attitude control of the cameras (102), so as to complete target tracking and anti-disturbance stability control.
[0027] The attitude sensing system (106) uses a nine-axis degree of freedom sensor GY-85, which includes a three-axis accelerometer ADXL345, a three-axis gyroscope ITG3205 an...
Embodiment 3
[0032] This embodiment is basically the same as Embodiment 1, especially in that:
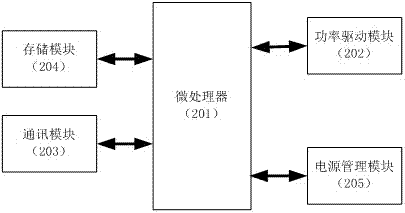
[0033] see figure 2, the main control system (105) in this underwater camera system includes a microprocessor (201), a power drive module (202), a communication module (203), a storage module (204) and a power management module (205), so The microprocessor (201) is respectively connected to the motion drive mechanism (107), the colored LED lighting (103) and the three-axis motion platform (104) via the power drive module (202) to realize the Motion control of the underwater robot mechanism (101), underwater environment lighting and attitude control of the camera (102), the microprocessor (201) communicates with the remote The control platform (108) realizes remote communication control and real-time data transmission, the microprocessor (201) is connected to the attitude sensing system (106) by using the IIC bus to obtain attitude information, and the microprocessor (201) and the The camera ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More