

Anthropomorphic wrist-finger hybrid mechanism
A hybrid mechanism and anthropomorphic technology, applied in the field of robotics, can solve problems such as difficult control, large number of drives, and complex structure, and achieve the effect of simple and compact, simple control, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
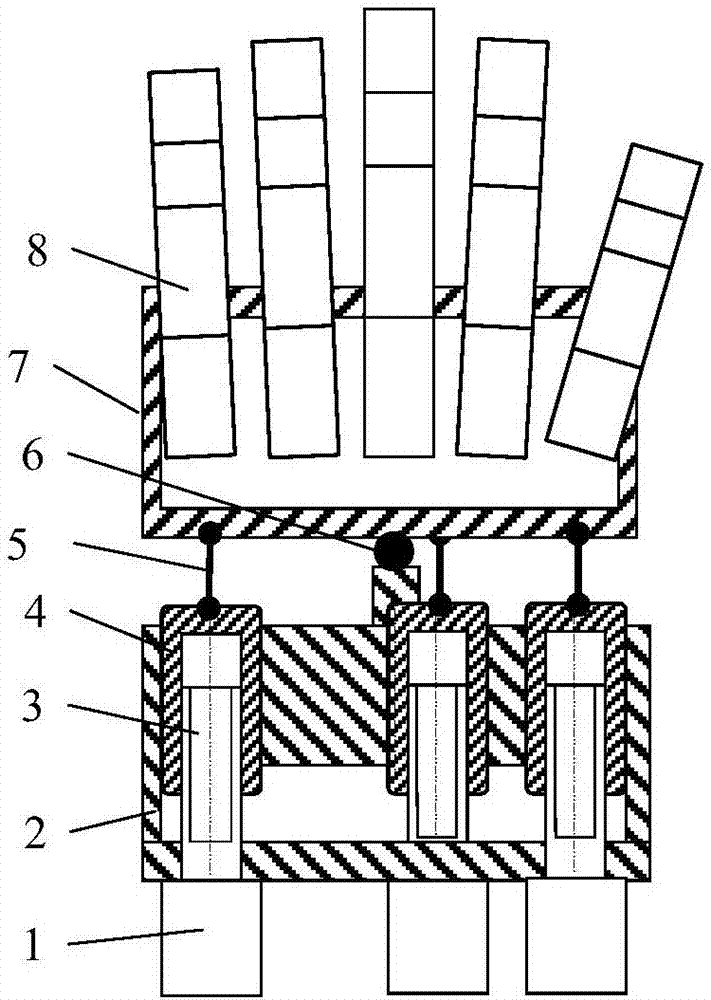
[0014] exist figure 1 In the schematic diagram of the anthropomorphic wrist-finger hybrid mechanism shown, the parallel wrist mechanism is connected with five finger mechanisms 8 with the same structure, and the palm frame 7 of the parallel wrist mechanism is connected with the ball pair at the upper end of the small arm frame 2. The three structures The same PSS-type drive branch chain is arranged in a circle on the palm frame and the upper end of the small arm frame. Hole rotation connection, motor 1 and the lower end of the small arm frame are axially fixed, the motor shaft and the lead screw are coaxially keyed, the lead screw is threaded with the open end of the nut sleeve 4, and the outer cylinder of the nut sleeve is connected to the upper end of the small arm frame through the hole The sliding key cooperates, and the closed end of the nut sleeve is connected with the ball pair at one end of the straight rod 5, and the other end of the straight rod is connected with the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More