

Model-free adaptive robust control method for small unmanned helicopter
A model-free adaptive, unmanned helicopter technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as unsatisfactory control accuracy, achieve compensation for model parameter uncertainty, and good control effect Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
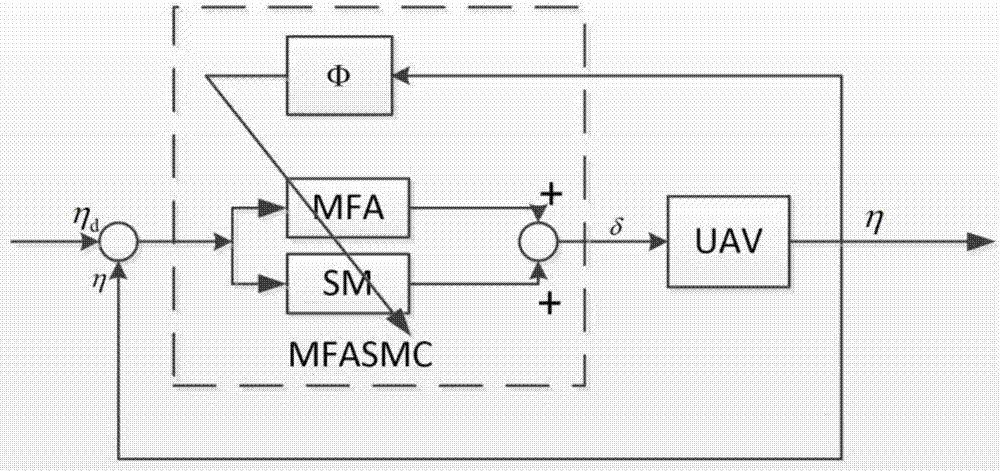
[0035] The technical solution adopted in the present invention is a model-free adaptive robust control method for small unmanned helicopters, the steps are as follows:
[0036] (1) Establish the coordinate system related to the small unmanned helicopter:
[0037] In order to facilitate the design of nonlinear controller and adaptive law, the following definitions are set:
[0038] The two coordinate systems are the inertial coordinate system {I} and the body coordinate system {B}, both of which satisfy the right-hand rule. The origin of the inertial coordinate system {I} is located on the ground, and the origin of the body coordinate system {B} is located on the drone centroid of {x I the y I z I} and {x B the y B z B} respectively represent the three main axes corresponding to the inertial coordinate system {I} and the body coordinate system {B};
[0039] (2) Establish the dynamic model between the UAV's use of the helicopter's lateral cyclic pitch change, longitud...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More