

Ocean wave model prediction method based on active disturbance rejection state observer
A state observer and model prediction technology, applied in weather condition prediction, instruments, measuring devices, etc., can solve problems such as inappropriate prediction, prediction accuracy affected by wave frequency and sea conditions, and small calculation amount of prediction accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
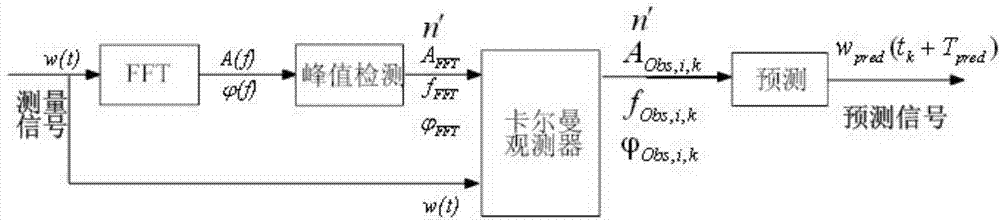
[0056] Since there is a certain time lag between the active heave compensation device and the heave attitude measurement sensor (inertial navigator IMU, or motion measurement unit MRU), it will seriously affect the performance of active heave compensation and even cause the compensation system to be unstable. Therefore, the research on the prediction of the heave state of the mother ship has great theoretical significance and practical application value. Such as figure 1 Shown is a schematic flow chart of a sea wave model prediction method based on fast Fourier transform, active disturbance rejection state observer and parameter adaptive compensation, including the following steps:
[0057] (1) For the heave movement, use the measurement sensor to collect the heave displacement signal within a measurement period. The heave displacement signal is composed of multiple simple harmonics under different time signals. The measured heave displacement signal Perform fast Fourier tran...
Embodiment 2
[0092] A kind of ocean wave model prediction method based on the ADRS state observer, its steps are as described in Embodiment 1, the difference is that in step (1), ΔT FFT The value is 5min.
Embodiment 3
[0094] A kind of ocean wave model prediction method based on the ADRS state observer, its steps are as described in Embodiment 1, the difference is that in step (1), ΔT FFT The value is 10min.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More