

High precision target sphere center extraction method in unstructured environment
An unstructured and extraction method technology, applied in the field of binocular vision, can solve the problems of uneven illumination of high-precision target balls, uneven surface gray scale, difficulty in extracting the center point of the sphere, etc., and achieve the improvement of visual measurement accuracy and extraction accuracy High, the effect of improving precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0034]Embodiment 1, the measured object of the present invention is a group of high-precision standard target balls with a center distance of 59.9506 mm. Two View Works cameras are used to obtain the original target ball image, which is processed as the original noisy image src. This example operates in the environment of Visual Studio2013 platform, C / C++ language and OpenCV visual library.
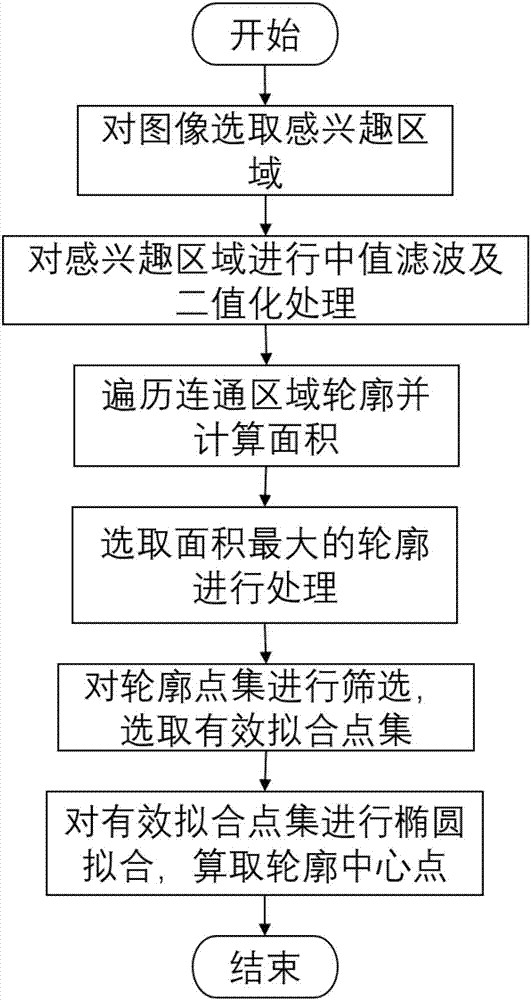
[0035] then follow the attached figure 1 The flow chart shown proceeds as follows.
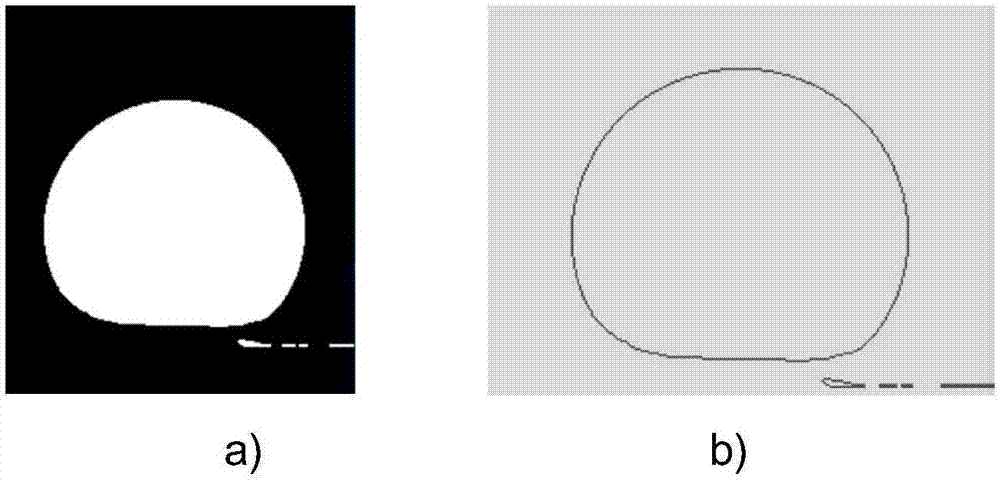
[0036] The first step is to denoise the image src in order to improve the stability and robustness of subsequent contour extraction and feature point set acquisition. Through the function cvSmooth, where the input method parameter is set to CV_MEDIAN, the median filter is performed on the image src, and the resulting image medDst is obtained as attached figure 2 shown. Then set the binarization threshold thr=55, and perform image binarization processing to obtain a binarized image thrDst. And becaus...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More