

Lasso-driven flexible upper-limb-rehabilitation robot
A rehabilitation robot and lasso technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of heavy rigid exoskeleton, strong sense of wearing coercion, difficult control, etc., to reduce driving load and control difficulty, reduce Motion inertia, the effect of improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
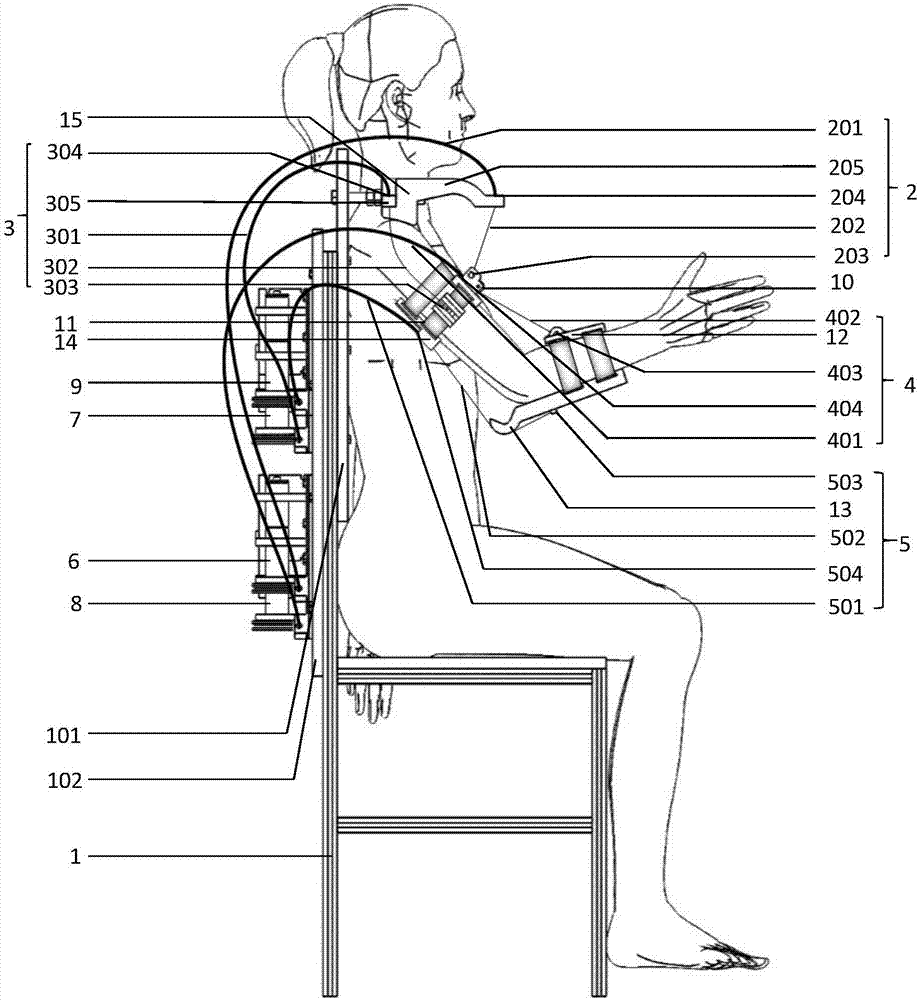
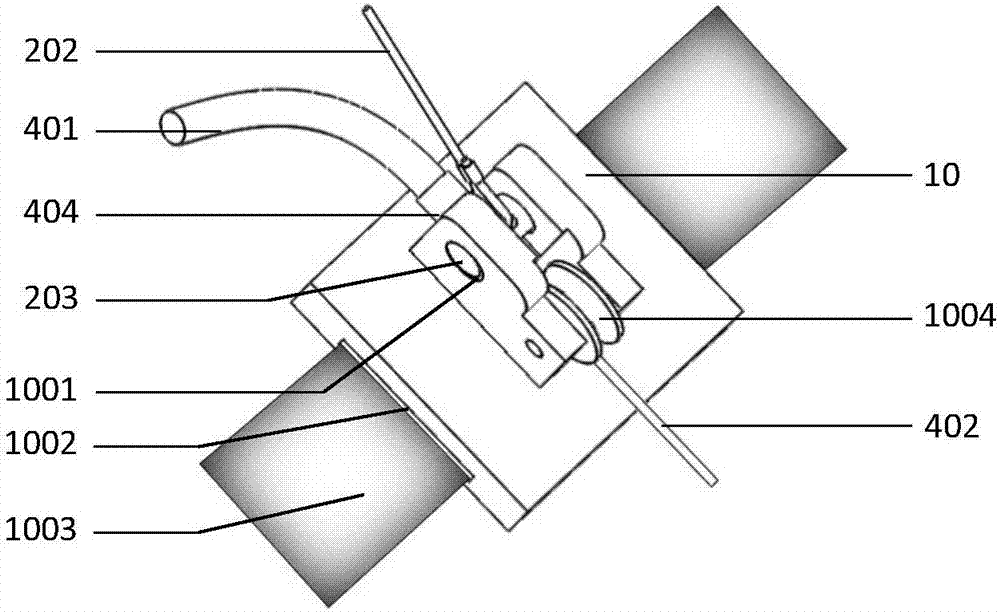
[0027] refer to figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 and Figure 7 , a flexible upper limb rehabilitation robot driven by a lasso, including a seat 1 that binds and fixes the human body, a front back panel 101 of the seat 1 is connected and fixed with a shoulder joint flexion / swing driving connection device 2, and the shoulder joint flexion / swing is driven The shoulder joint flexion internal line shaft 203 of the connecting device 2 is connected with the front connecting piece 10 of the upper arm bound and fixed on the human body, and the first lasso 201 of the shoulder joint forward flexion / swing drive connecting device 2 is connected with the shoulder joint forward flexion drive unit 6 , the front backboard 101 of the seat 1 is connected and fixed with the shoulder joint abduction / hem drive connection device 3, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More