

A piezoelectric driven two-degree-of-freedom decoupling micro-swing platform
A technology of piezoelectric drive and degree of freedom, which is applied in the field of micro-positioning, can solve the problems of increasing platform processing costs, high requirements for assembly precision, and influence of platform motion precision, and achieves improved static and dynamic characteristics, reduced control difficulty, and compact structure. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] In order to further understand the content, features and effects of the present invention, the following embodiments are given as examples, and detailed descriptions are as follows with accompanying drawings:
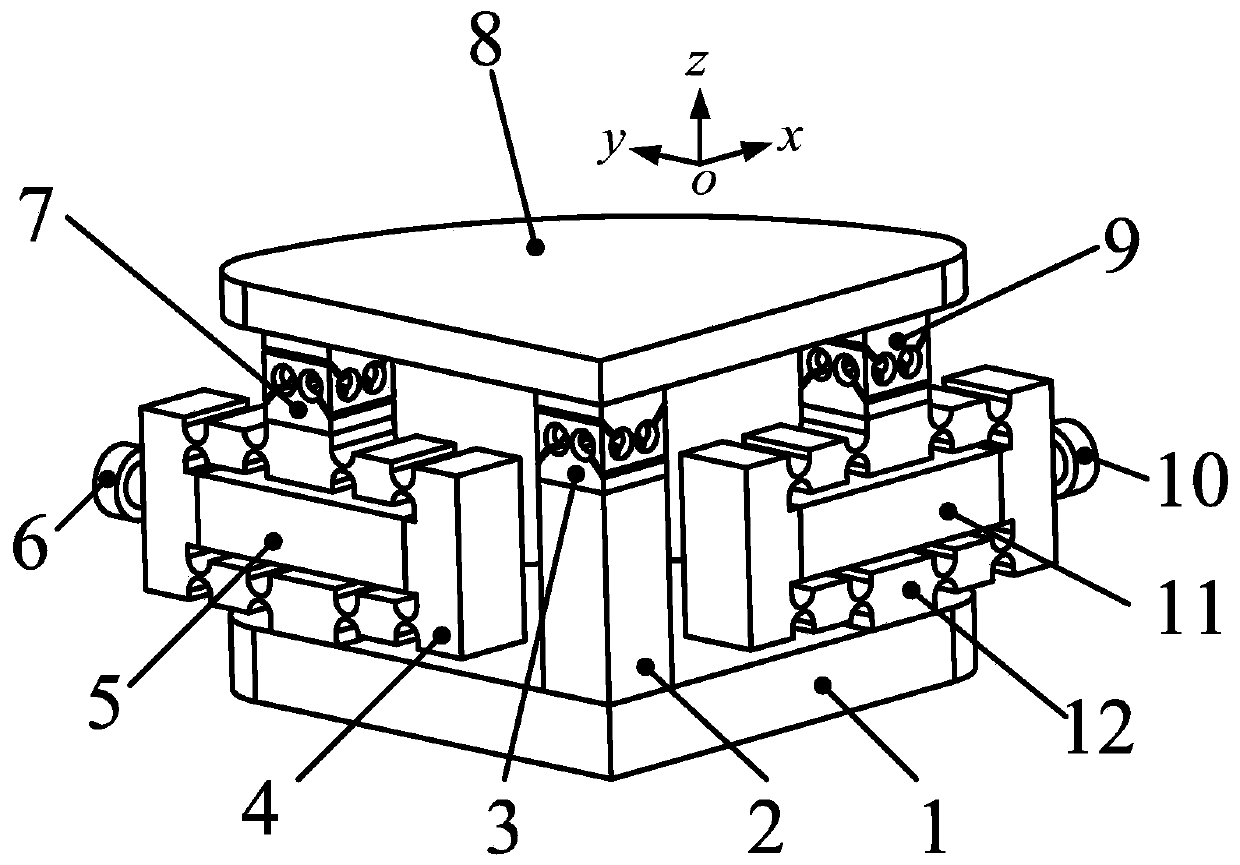
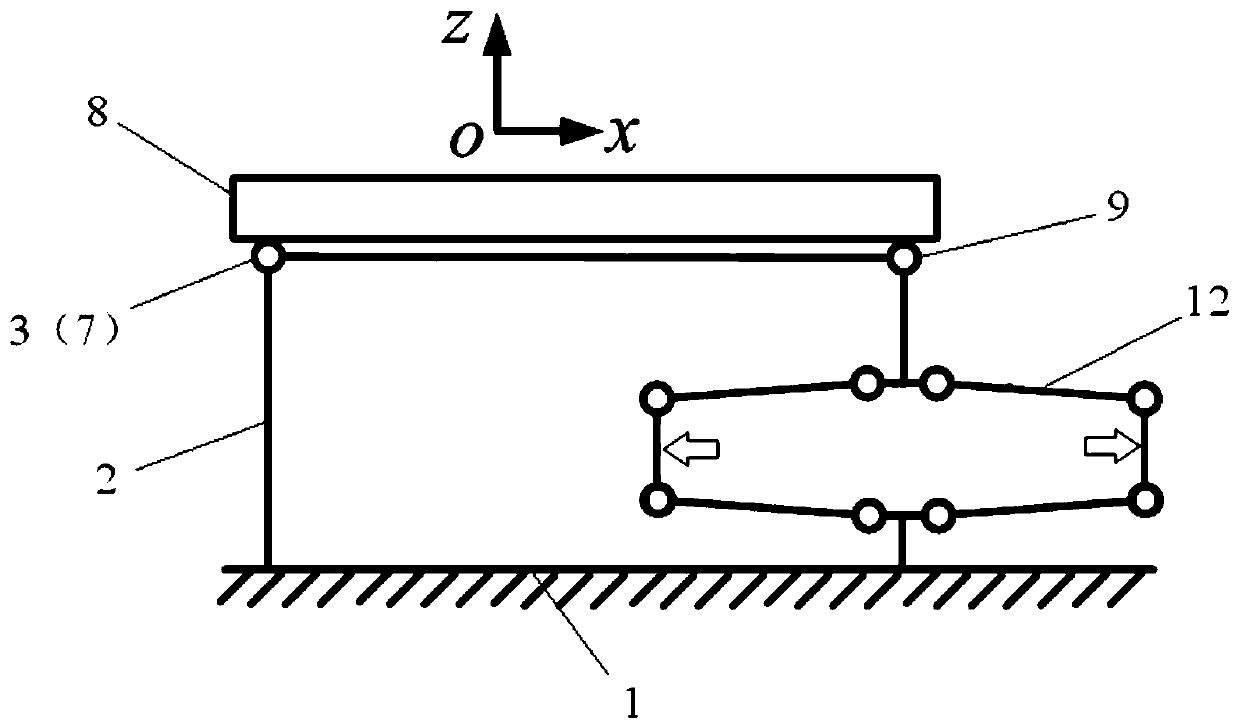
[0017] See Figure 1 ~ Figure 3 , The embodiment of the present invention protects a piezoelectric-driven two-degree-of-freedom decoupling micro-swing platform, including a base 1, a column 2, a decoupling Hooke hinge 3, an X-axis bridge type amplifying mechanism 12, and an X-axis piezoelectric ceramic driver 11. X-axis pre-tightening bolt 10, X-axis Hooke hinge 9, Y-axis bridge type amplifier 4, Y-axis piezoelectric ceramic driver 5, Y-axis pre-tightening bolt 6, Y-axis Hooke hinge 7, working platform 8.
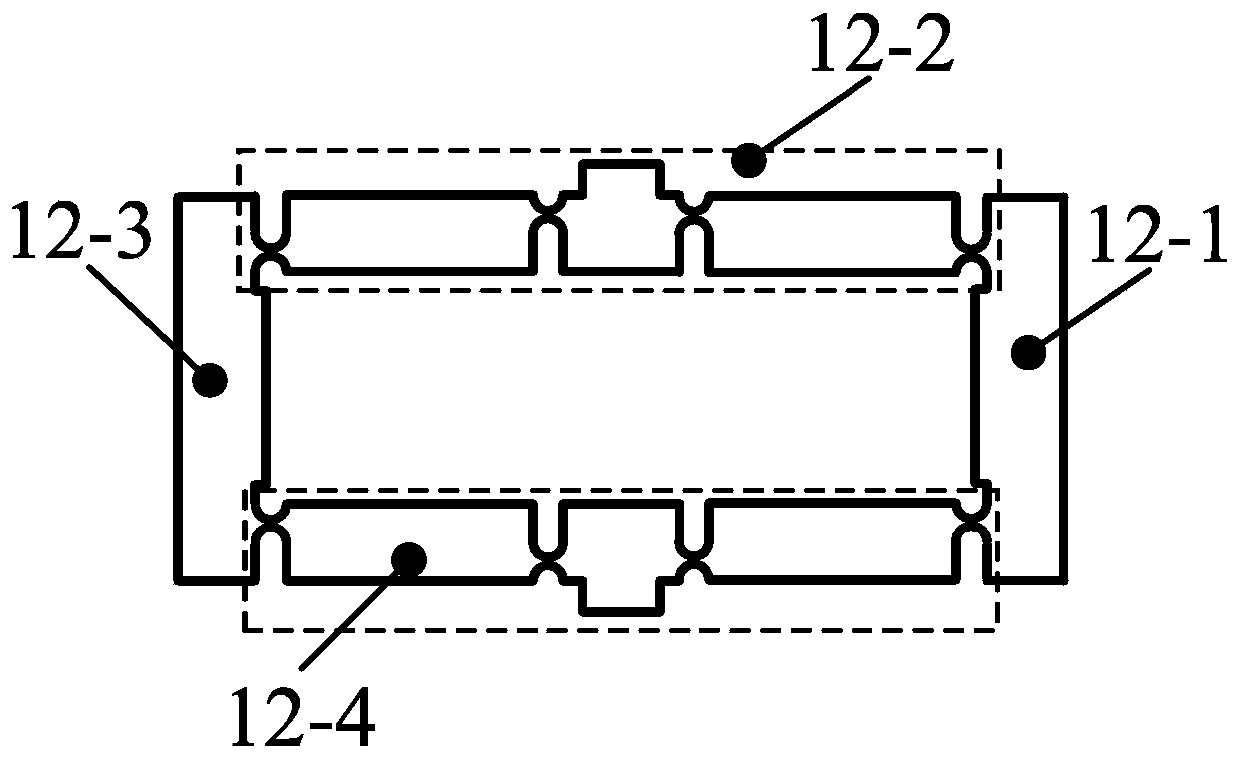
[0018] In this embodiment, the base 1 is a triangular or sector-shaped flat plate, and the X-axis and Y-axis bridge-type amplification mechanisms 12, 4 are installed on the outer sides of the two sides of the triangular or sector-shaped base 1. The magnification m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More