Online prediction method and system for automobile steering control characteristics
A prediction method and technology of automobiles, applied in the direction of control devices, etc., can solve problems such as poor stability, low accuracy, and difficulty in effectively predicting steering characteristics of automobiles, and achieve high stability and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The invention provides a kind of online prediction method of automobile steering handling characteristic, comprising steps:
[0045] Collect the real-time steering wheel angle value and motor speed of the car, and calculate the predicted yaw rate of the car at the next moment according to the steady-state response equation of the yaw rate after parameter prediction using the Kalman filter;
[0046] According to the calculated predicted yaw rate, the yaw rate control of the vehicle is realized.
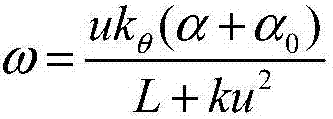
[0047] Further as a preferred embodiment, the formula of the yaw rate steady-state response equation is as follows:
[0048]
[0049] In the above formula, ω represents the yaw rate, k represents the understeer coefficient, α represents the steering wheel angle, and α 0 Indicates the zero deflection angle of the steering wheel, L indicates the wheelbase, k θ Indicates the EPS transmission ratio, u indicates the forward speed of the vehicle;
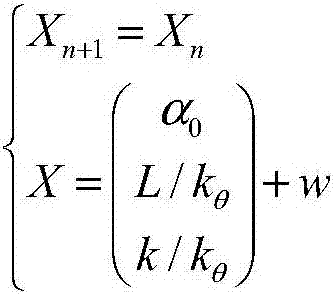
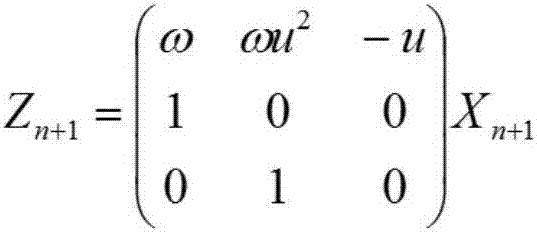
[0050] Among them, the zero de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More