

Motion path anticollision adjustment method for grinding of robot belt
A technology of robot abrasive belt and robot motion, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as collisions in the process of robot grinding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The present invention will be further described in detail below with reference to the drawings and examples, but the embodiments of the present invention are not limited thereto.
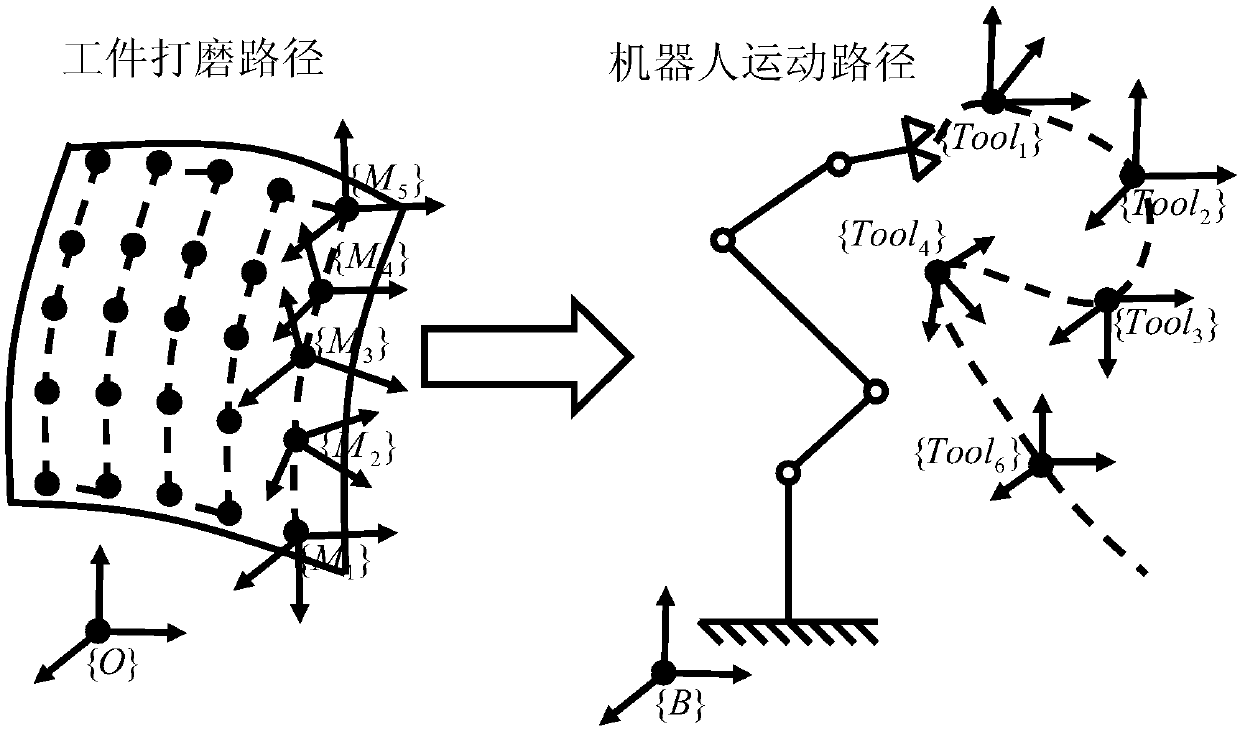
[0070] Such as figure 1 As shown, a motion path collision avoidance adjustment method for robot abrasive belt grinding, including steps:
[0071] 1) The step of generating the motion path of the robot, that is, converting the grinding path of the workpiece into the motion path of the robot;
[0072] 2) The step of adjusting the collision avoidance of the robot's motion path, that is, by changing the pose of each knife contact point on the motion path of the robot during grinding, so that the robot can avoid collisions during the machining process.
[0073] Specifically, the step of converting the grinding path of the workpiece into the motion path of the robot in step 1) is specifically to map each tool contact point on the grinding path to the pose of the corresponding path point on the mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More