

Method for controlling steering stability of distributed-drive electric vehicle
A technology for stability control and electric vehicles, applied in electric vehicles, control drives, control devices, etc., to reduce convergence time, improve rapidity and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with accompanying drawing.
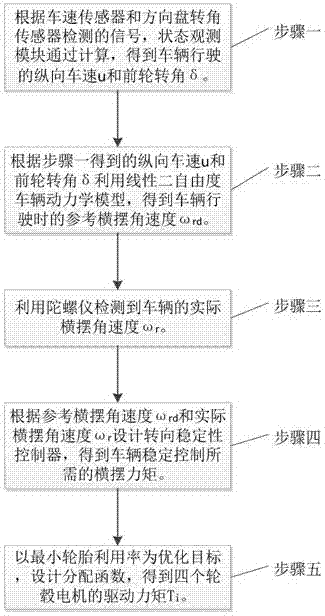
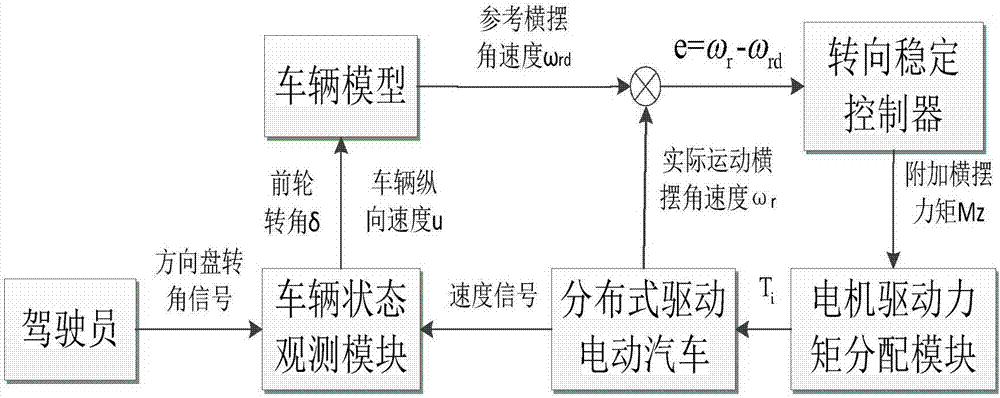
[0021] like figure 1 , image 3 As shown, according to the driver's steering wheel angle input signal and the vehicle longitudinal speed signal, the vehicle model module calculates the vehicle reference yaw rate ω rd .
[0022] The reference vehicle model described in the present invention is a vehicle two-degree-of-freedom linear model, and the two-degree-of-freedom are two degrees of freedom of the center of mass sideslip angle and yaw rate, and the state equation of the reference model is:
[0023]
[0024] Among them, β is the sideslip angle of the center of mass of the vehicle, ω r is the yaw rate of the vehicle, k 1 is the cornering stiffness of the front axle, k 2 is the cornering stiffness of the rear axle, a is the distance from the front axle to the center of mass of the vehicle, b is the distance from the rear axle to the center of mass of the vehicle, m ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More