

Method for analog computation of concentration of pollutant in sensitive area
A technology for pollutant concentration and sensitive areas, which is applied in the field of analog calculation of pollutant concentrations in sensitive areas, can solve the problems of poor applicability and inability to establish accurate and effective models, and achieve strong practicability, large-scale engineering applications and management application prospects, Reduce the effect of input parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to further describe the technical features and effects of the present invention, the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
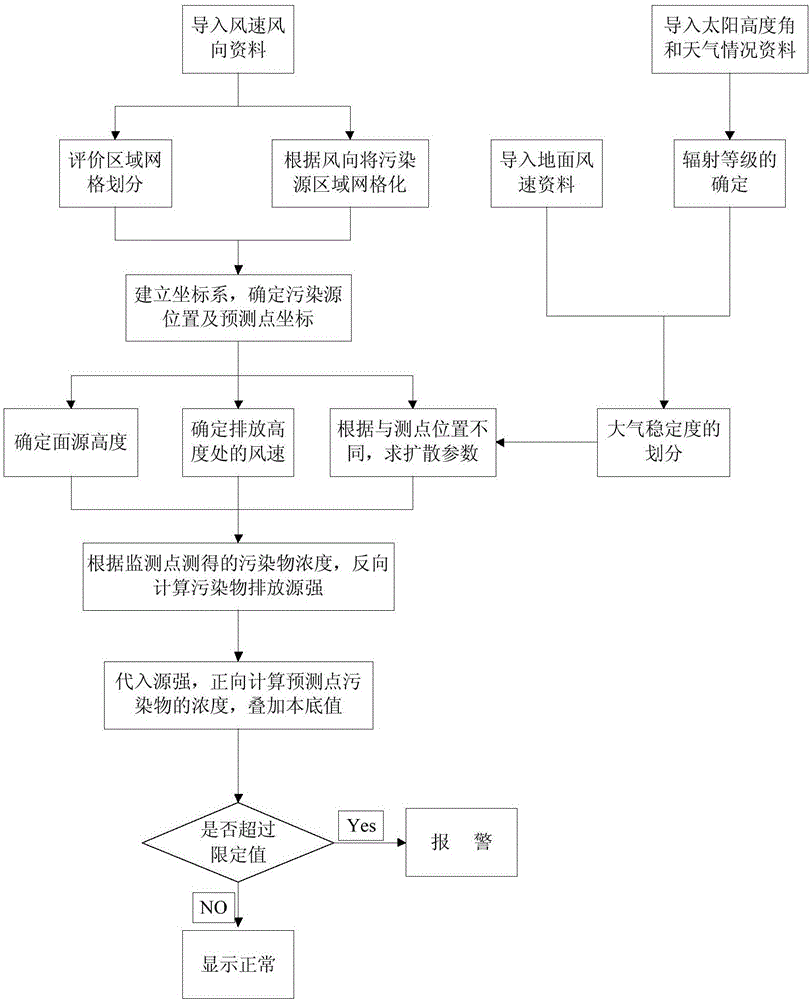
[0043] refer to Figure 1-Figure 3 , a method for simulating and calculating the concentration of pollutants in sensitive areas. The invention is based on the Gaussian model. According to the wind speed, the windy, small wind, and calm wind models are selected, and the pollution of sensitive points around the park is respectively determined by grid division of pollutant area sources. Concentration of substances, and then overlay calculation.
[0044] The coordinate system is established to determine the location of the pollution source and the coordinates of the predicted point
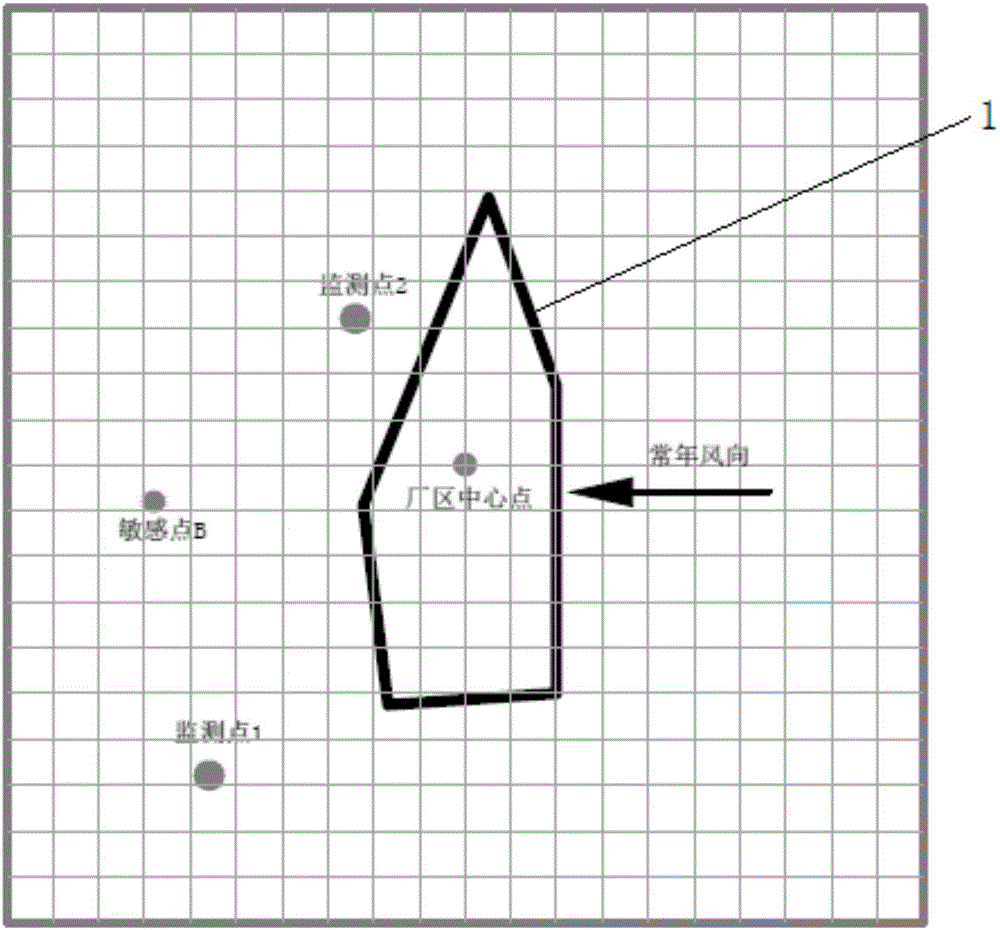
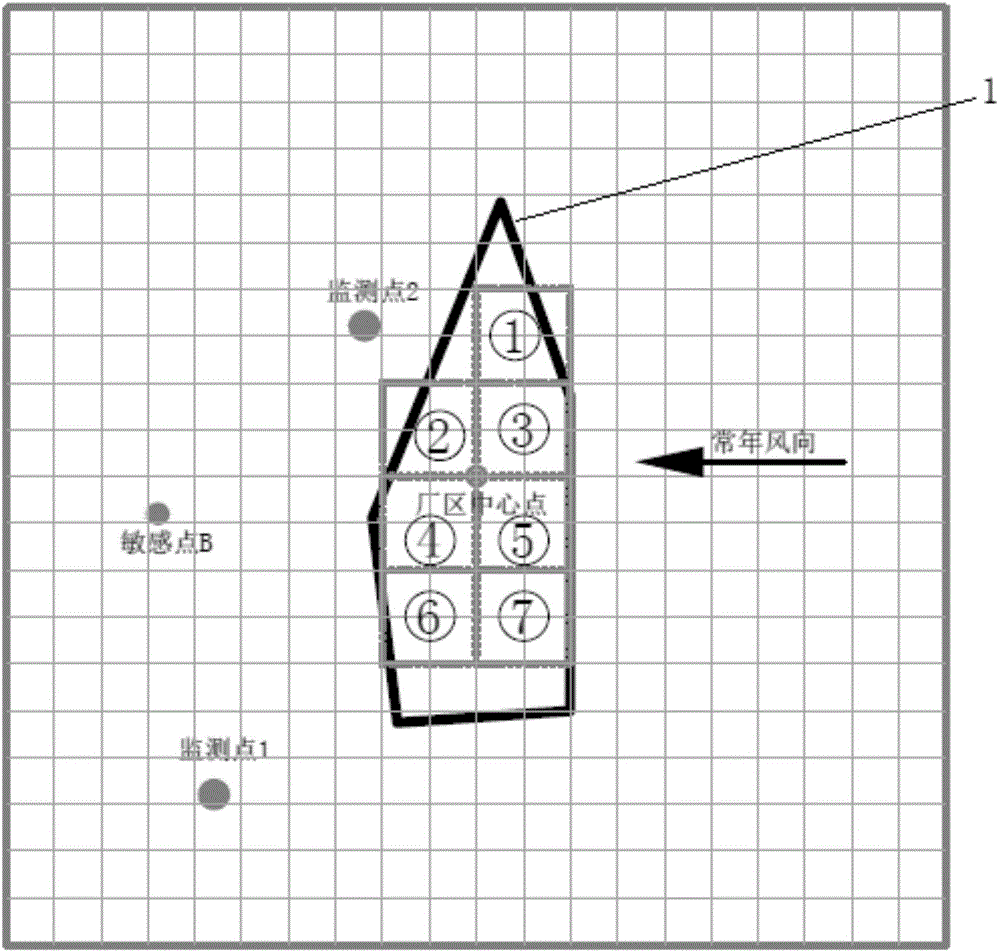
[0045] Evaluation area meshing
[0046] The center point of the non-point source pollution area is set as the equivalent point of the total source intensity, and the plant area ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More