

Method for safe landing area searching of mini-type unmanned autogyro through adoption of monocular focus-adjustable liquid state lens
A technology for autogyro and safe landing, applied in the field of unmanned aerial vehicles, can solve problems such as damage of unmanned aerial vehicles, and achieve the effects of fast focusing speed, simple structure, and simple and effective algorithm implementation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0030] see figure 1 ~ image 3 , the method for finding a safe landing area with a monocular electric adjustable focus liquid lens for a small unmanned autogyro is characterized in that it uses an airborne camera equipped with a monocular electric adjustable focus liquid lens to solve the problem of discriminating and selecting when the rotorcraft lands. The problem of landing in a flat area, to avoid landing on an uneven ground will cause the drone's fuselage and propeller to touch the ground and cause damage to the drone; the implementation steps are as follows:
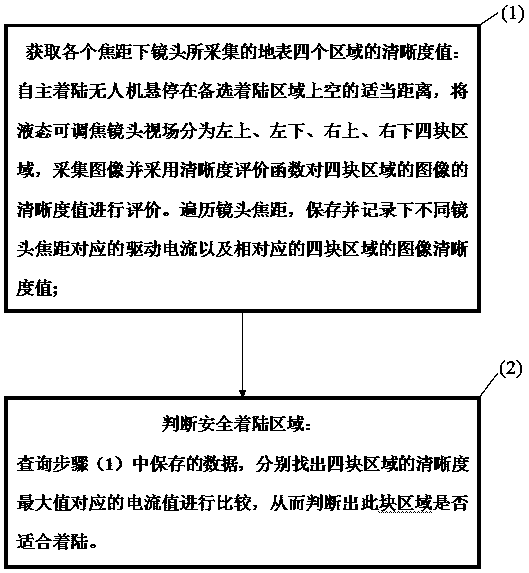
[0031] (1) Obtain the sharpness values of the four areas of the surface collected by the lens at each focal length: the autonomous landing drone hovers at an appropriate distance over the candidate landing area, and the field of view of the liquid adjustable focus lens is divided into upper left and lower left , upper right, and lower right areas, collect images and use the sharpness evaluation function to eval...
Embodiment 2
[0034] This embodiment is basically the same as Embodiment 1, and the special case is as follows:
[0035] The steps (1) to obtain the sharpness values of the four areas of the surface photos collected by the lens at each focal length are as follows:
[0036] (1-1) When the small unmanned autogyro completes a specific task and prepares to land, it hovers within 1 to 3 meters above the alternative landing ground;
[0037] (1-2) Monocular liquid focusable lens collects one frame of surface image;
[0038] (1-3) Using the image segmentation algorithm in the image pixel resolution ( ) width and middle point, divide the image into four areas A, B, C, and D symmetrically;
[0039] (1-4) Use the sharpness evaluation function to calculate the sharpness values of the current A, B, C, and D four area surface images respectively, and save the current value of the current lens drive and the sharpness values of the four areas correspondingly ;
[0040] (1-5) Change the driving...
Embodiment 3
[0048] An embodiment of the present invention provides a method for finding a suitable landing area with a monocular electric adjustable focus liquid lens for a small unmanned autogyro, including:
[0049] see Figure 3a ,
[0050] 10: Obtain the sharpness values of the four areas of the surface photos collected by the lens at each focal length.
[0051] include:
[0052] 101: The self-landing UAV hovers at an appropriate distance (1-3 meters) above the candidate landing area, and divides the field of view of the liquid adjustable focus lens into four areas: A, B, C, and D;
[0053] Wherein, the specific implementation 101 includes: the UAV hovers in the air at a proper distance. It is to provide a unified environmental condition for traversing the focal length of the lens to obtain the image sharpness value later.
[0054] 102: Traverse the focal length of the liquid adjustable focus lens, collect a frame of ground surface image at each focal length, divide the image in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More