

Unmanned aerial vehicle route planning algorithm based on polygonal obstacle detection
An obstacle detection and polygonal technology, applied in vehicle position/route/height control, navigation calculation tools, non-electric variable control, etc., can solve problems such as route depressions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
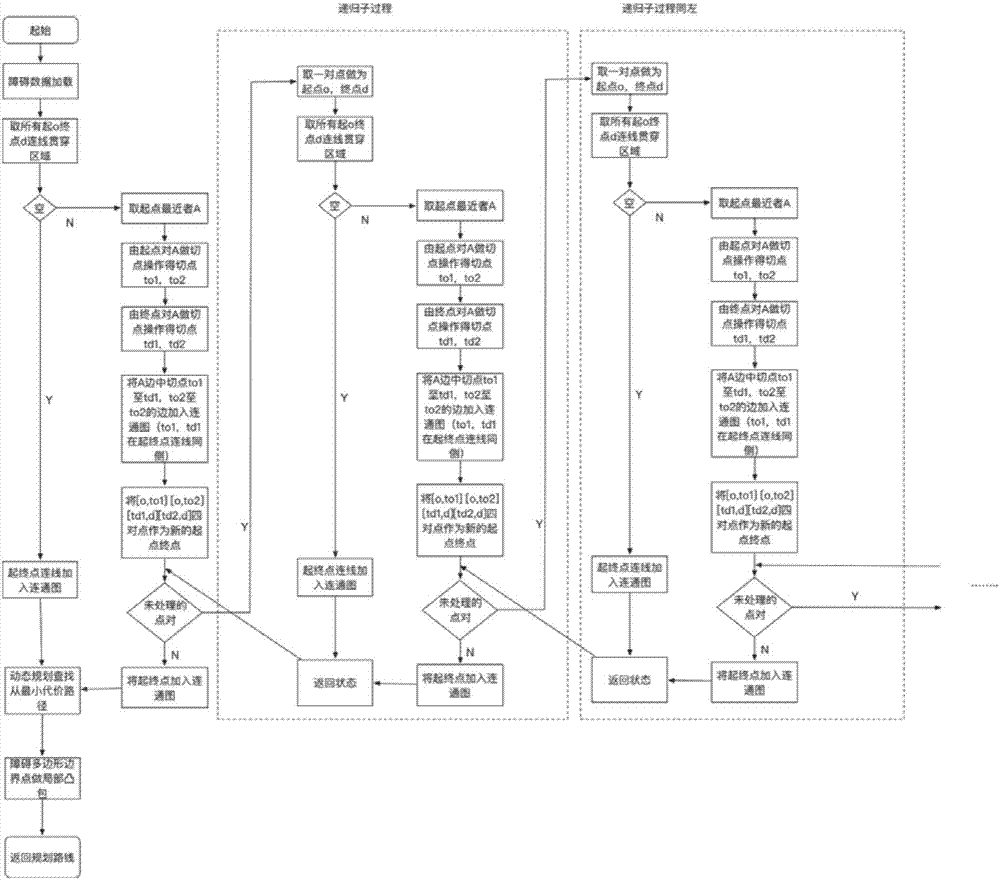
[0035] The invention provides a UAV route planning algorithm based on obstacle detection: 1) For the obstacle area closest to the starting point on the connection line between the starting point and the ending point, use the starting point and ending point to perform a point-cutting operation on it; The point is used as the new starting point and the ending point, and the tangent point from the ending point to the ending point is used as the new starting point and ending point, which is the main process of the algorithm for recursive planning. 2) Perform a point-cutting operation on the polygonal obstacle area from the point. 3) The local convex hull optimization operation of polygons based on virtual auxiliary points.
[0036] Hereinafter, the present invention will be further described in conjunction with the drawings and embodiments.
[0037] 1) The main process of UAV route planning algorithm
[0038] figure 1 It is a flow chart of the main process of the UAV route plan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More