

Adaptive layered hierarchical path tracking control method of automatic driving automobile
A technology of path tracking and automatic driving, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of not considering the time-varying characteristics of road friction conditions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
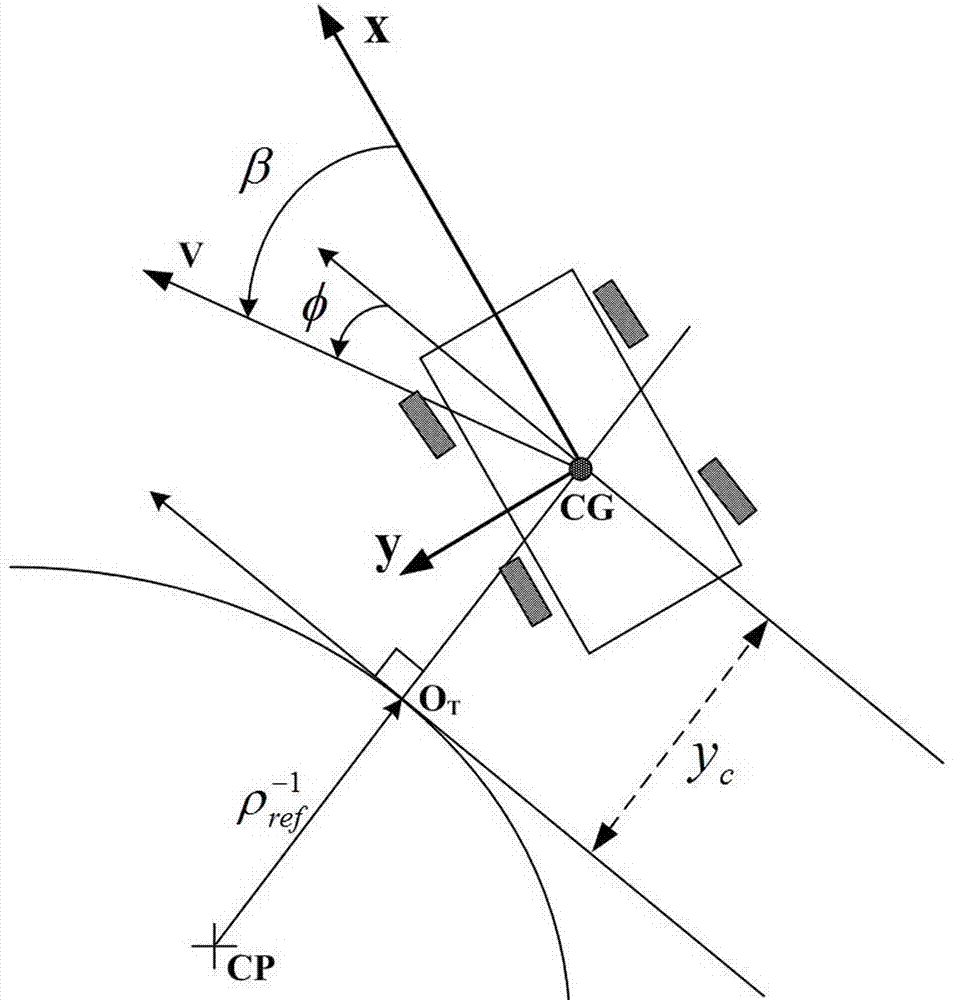
[0147] According to the path tracking control target of the self-driving car, the vehicle revolves around the reference path curvature center CP and the tangent velocity is v 0 The ideal state selection of is shown in formula (10):
[0148] x d =[0 0 v 0 ρ ref 0 0] T (10)
[0149] Among them, v 0 is the constant velocity, ρ ref For tracking curvature, define the path tracking error e=x-x d , the error dynamic equation is formula (11):
[0150]
[0151] Design the upper controller as formula (12):
[0152] u c =-Ke-Γ (12)
[0153] in, Then the error dynamics is formula (13):
[0154]
[0155] Choose K such that A 0 =A-BK is Hurwitz matrix, when u=u c When , the equilibrium point of formula (13) is uniformly exponentially stable.
Embodiment 2
[0157] The cost function J(t,S) of the middle layer controller in step f) Ldj ,S Sdj ) is selected as shown in formula (14):
[0158]
[0159] Among them, W u is a positive definite weight matrix, and at the same time, p i and q i is a normal number. S Lmin , S Lmax , S Smin , and S Smax is the limiting value of the wheel slip rate amplitude; based on formula (9) and formula (12), the adaptive law of dynamic optimization of wheel slip rate is equation (15):
[0160]
[0161] The friction parameter adaptation law is Equation (16):
[0162]
[0163] Among them, Γ l =diag(γ lj ), Γ k =diag(γ kj ), W h >0, and at the same time,
[0164]
[0165]
[0166]
[0167] Then the closed-loop system is at the equilibrium point is uniformly asymptotically stable.
[0168] Therefore, the optimization algorithm based on the middle layer controller can realize the dynamic optimization of the longitudinal and lateral slip ratio of the wheel, and identify the fr...
Embodiment 3
[0170] The horizontal quarter vehicle model of the lower controller in step f) is shown in formula (17):
[0171]
[0172] Based on the definition of wheel slip ratio, formula (5) is differentiated, and the formula The wheel slip rate dynamic equation (19) is obtained:
[0173]
[0174] in,
[0175]
[0176]
[0177]
[0178] When the wheel slip angle α j When small, cosα j ≈1; and when v yj , S Sj are small, v yj S Sj and can be approximately 0; at the same time, When , based on the truncated Taylor series expansion, the wheel slip rate dynamic equation is shown in formula (20):
[0179]
[0180] in, S Ldj , S Sdj is the ideal value of wheel slip ratio,
[0181] definition The dynamic equation (21) of wheel longitudinal slip rate error can be obtained as:
[0182]
[0183] when k j When unknown, the friction parameter adaptive law and the deterministic equivalent control law are shown in formula (22):
[0184]
[0185] in, S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More