

Unmanned aerial vehicle system and method for nuclear radiation radioactive source positioning and capturing
A technology of unmanned aerial vehicles and radioactive sources, which is applied in the direction of control/regulation systems, unmanned aircraft, rotorcraft, etc., can solve the problems of inability to recover radioactive materials and the inability to detect the obstacle environment of UAVs, and achieve The effect of reducing personnel participation and ensuring personal safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
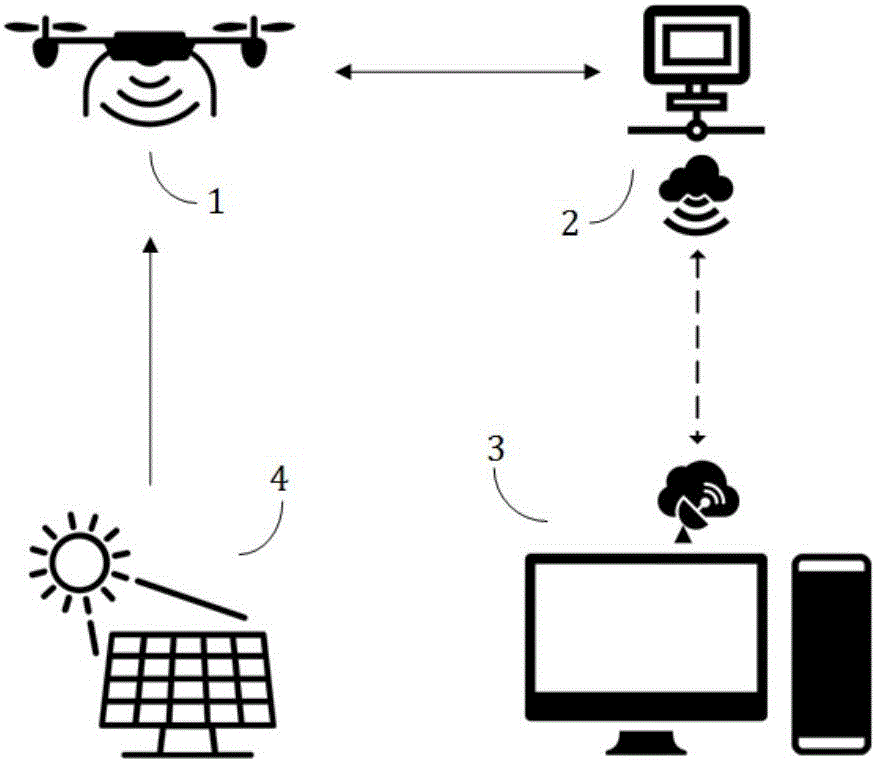
[0028] Such as figure 1 As shown, this embodiment includes: a ground station device 3, an unmanned aerial vehicle 1, a solar electric device 4 and a positioning and grabbing device 2 arranged on the unmanned aerial vehicle 1, wherein: the solar electric device 4 is an unmanned aerial vehicle 1, The positioning and grabbing device 2 supplies energy, and the ground station device 3 receives the information of the UAV 1 and the positioning and grabbing device 2, and feeds back the control commands of the emergency personnel to the positioning and grabbing device 2 to control the UAV 1 and the The positioning and grasping device 2 performs positioning and grasping of radioactive sources in the nuclear radiation area.
[0029] The UAV 1 is a small unmanned aerial vehicle controlled by a radio remote control device or an airborne control panel, including but not limited to: a fixed-wing UAV 1, a multi-rotor UAV 1, an unmanned paraglider or Drone 1 airship.
[0030] Such as image...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More