

Dispersed-learning optimal control method of reconfigurable robot in contact with uncertain environment
A technology for reconfiguring robots and optimal control, applied in adaptive control, general control systems, control/regulation systems, etc., can solve robot joint chattering effects, low stability and control accuracy, and uncertain reconfigurable robots System high-precision decentralized optimal control and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The present invention will be described in further detail below in conjunction with the accompanying drawings.
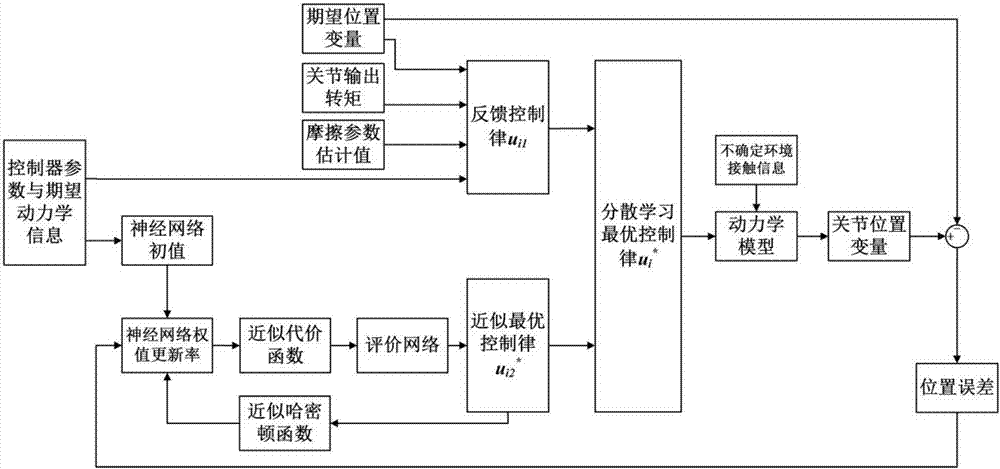
[0072] Such as figure 1 As shown, using the distributed learning optimal control method for reconfigurable robots of the present invention, the key processing methods and processes in its realization are as follows:
[0073] 1. Establishment of dynamic model.
[0074] The dynamic model of the reconfigurable robot system is established as follows:
[0075]
[0076] In the above formula, the subscript i represents the i-th module, and I mi is the moment of inertia of the rotating shaft, γ i is the gear ratio, θ i , and are the joint positions, velocities and accelerations, respectively, is the joint friction term, is the coupling torque cross-link term between joint subsystems, τf i is the joint output torque, τ i is the motor output torque.
[0077] In formula (1), the joint friction term It can be considered as a function of joint position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More