

Oil sac-type underwater glider buoyancy accurate control method
An underwater glider, temperature-salt technology, applied to underwater ships, underwater operating equipment, height or depth control, etc., can solve problems such as inability to effectively capture ocean phenomena, and inability to ensure in-situ observation of ocean phenomena
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] 1. Establish a profile model of ocean temperature and salt density. Establish a basic temperature-salinity profile model by using historical observation data and the initial profile observation data of the underwater glider, and obtain the vertical distribution of seawater temperature, salinity, and density in the target area. Changes, using the observations to correct the temperature and salt density model.
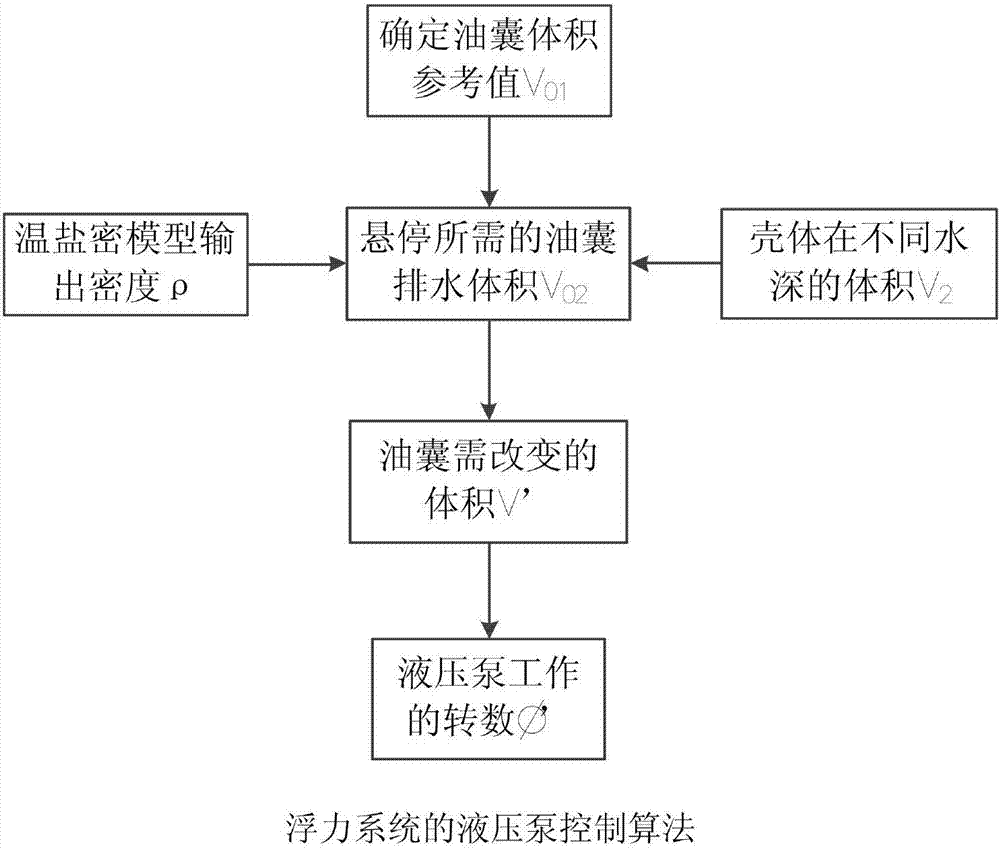
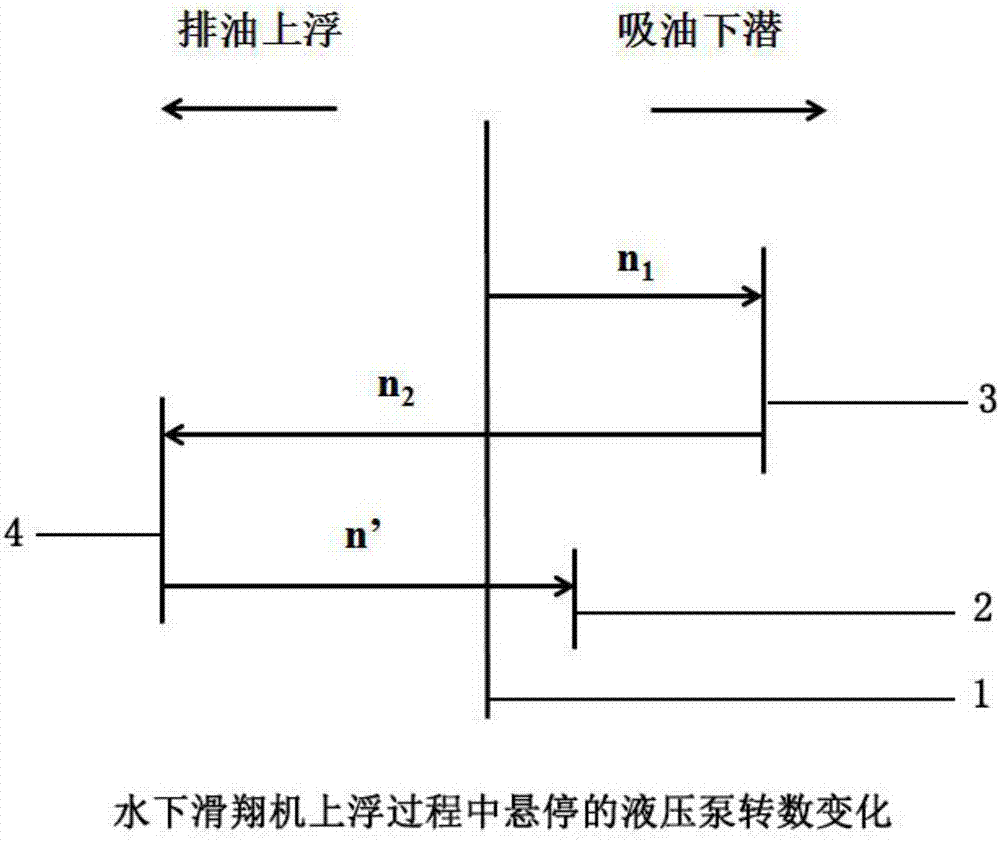
[0014] 2. Propose the hydraulic pump control algorithm of the buoyancy system.
[0015] 1) From the pressure test, the volume V of the pressure-resistant shell of the underwater glider under different water pressures is calibrated 2 ;
[0016] 2) According to the density of seawater on the sea surface and the volume of the underwater glider under normal pressure, take an intermediate value V of the oil volume variation range of the outer skin bag 01 , as the reference value of the neutral state of the underwater glider;
[0017] 3) According to the seawater de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More