

Relocation method and device of terminal location, terminal and storage medium
A terminal position and relocation technology, applied in the field of relocation, can solve the problems of increasing labor costs, increasing use costs, reducing robot autonomy, etc., to achieve the effect of reducing excessive consumption and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
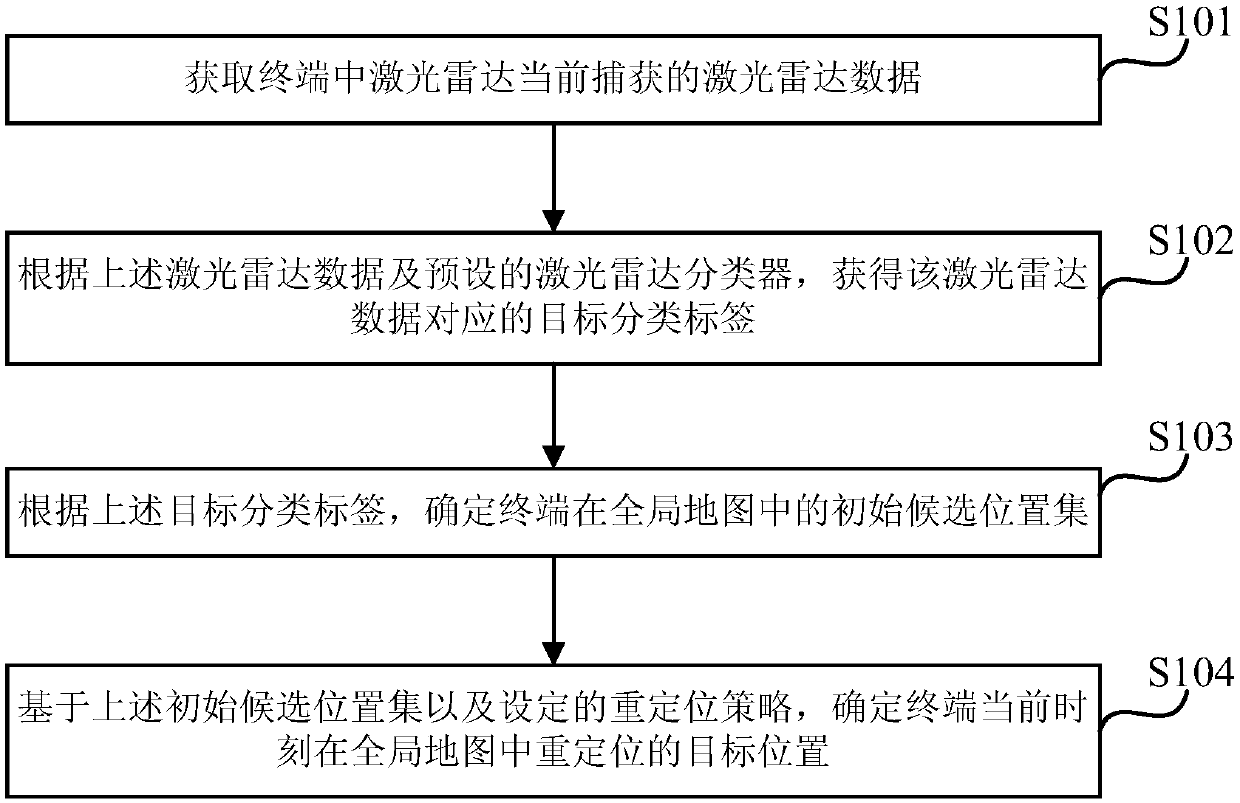
[0038] Figure 1a It is a schematic flowchart of a method for relocating a terminal location provided by Embodiment 1 of the present invention. This method is suitable for relocating the location of the terminal when the initialization or positioning of the terminal location fails. implemented by a device, where the device may be implemented by software and / or hardware, and generally integrated into a control device of a terminal.
[0039] It should be noted that the terminal may specifically refer to electronic terminal devices capable of performing related tasks by themselves, such as robots, smart furniture devices, and smart service devices. It can be understood that when the above-mentioned terminal performs position initialization or when the position information is wrong during the working process, the position of the terminal needs to be relocated. Based on the method for relocating the terminal position provided in this embodiment, the terminal position can be quickly ...
Embodiment 2
[0057] Figure 2a It is a schematic flowchart of a method for relocating a terminal location provided by Embodiment 2 of the present invention. Embodiment 2 of the present invention is optimized based on the above embodiment. In this embodiment, further optimization is added: construction and training learning center LiDAR classifier described above.
[0058] On the basis of the above optimization, further optimize the construction and training of the laser radar classifier as follows: after the trained data feature network model, the classification network model to be trained is added to form a laser radar classifier to be trained; At least one frame of historical radar data is input into the data feature network model to obtain the data feature vector of the at least one frame of historical radar data; according to the data feature vector of each historical radar data and the classification division strategy set, determine each historical radar A standard classification lab...
Embodiment 3
[0111] image 3 It is a schematic flowchart of a method for relocating a terminal location provided by Embodiment 3 of the present invention. The embodiment of the present invention is optimized based on the above embodiments. In this embodiment, it is further determined that the terminal is relocated in the global map at the current moment based on the initial candidate location set and the set relocation strategy. The target position of the target position is embodied as: using multivariate Gaussian distribution sampling to determine the prior probability distribution of each candidate position in the initial candidate position set at the current moment of the terminal; in the posterior probability distribution determined according to the prior probability distribution , determining that the candidate position corresponding to the maximum a posteriori probability value is the target position for relocation of the terminal in the global map at the current moment.
[0112] At...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More