

Multi-pose pole climbing robot wireless control system
A wireless control and robot technology, applied in the general control system, control/regulation system, computer control, etc., to achieve the effect of improving data collection efficiency and reducing cumbersomeness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
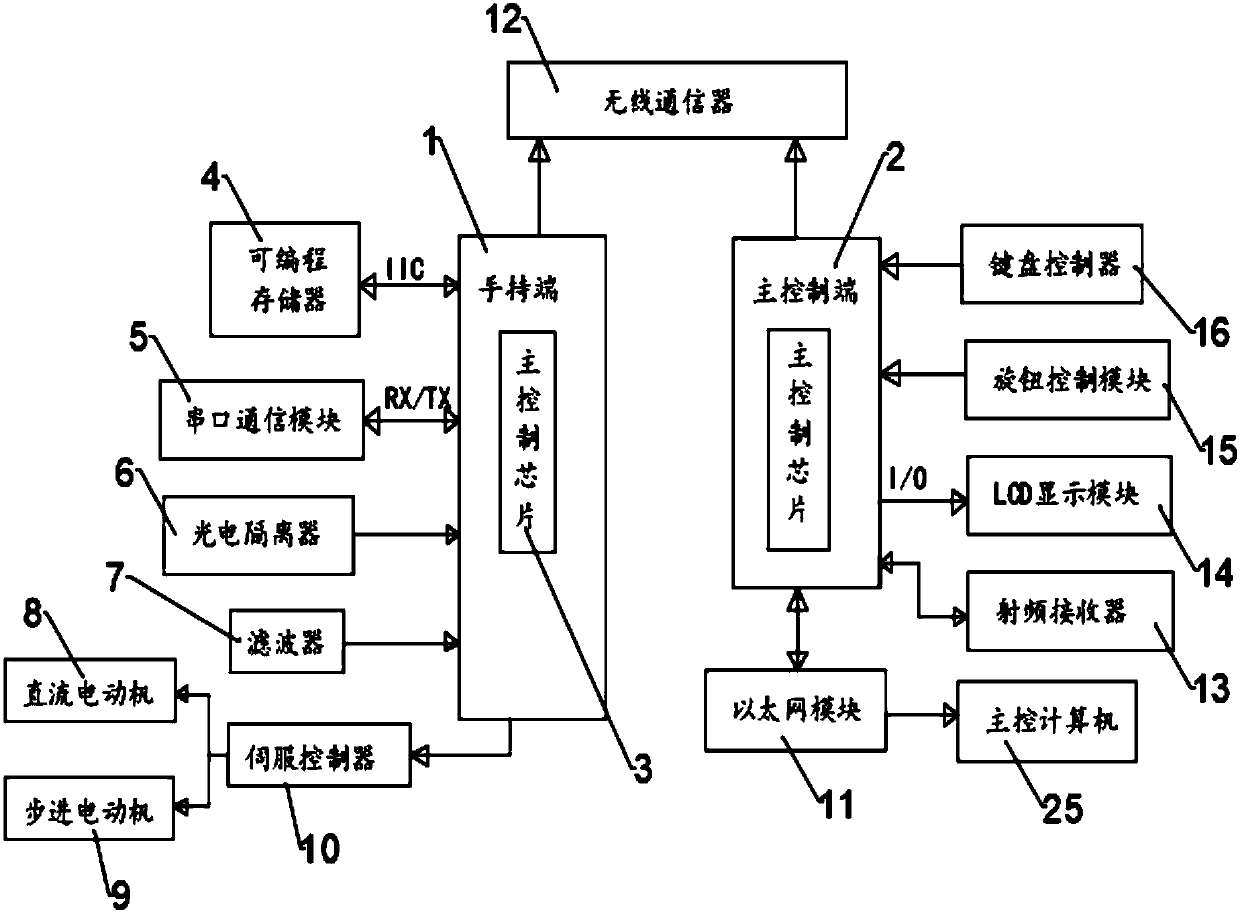
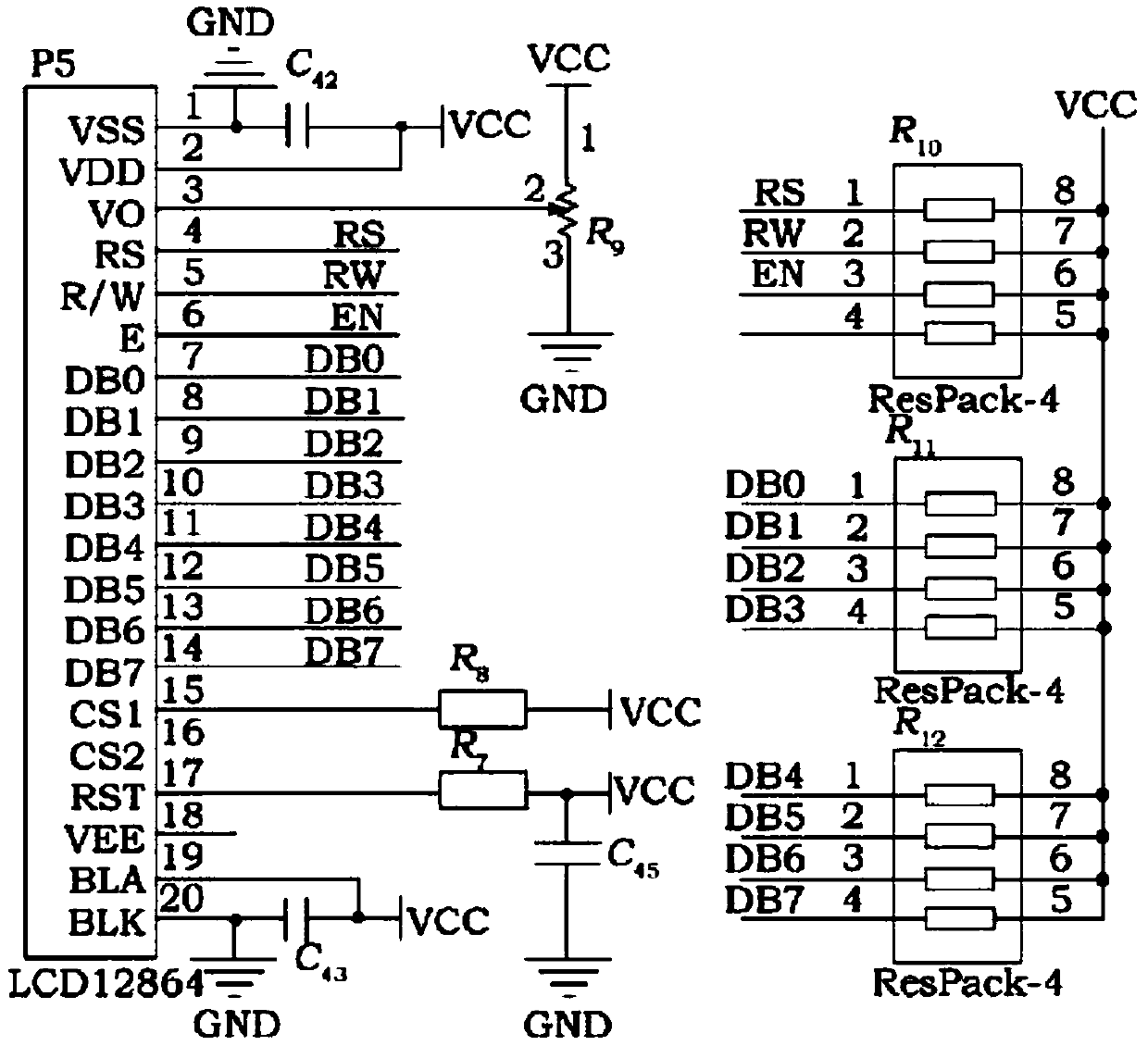
[0026] like figure 1 and image 3 As shown, the present invention provides a wireless control system for a multi-posture pole-climbing robot, comprising a handheld terminal 1 and a main control terminal 2, the handheld terminal 1 and the main control terminal 2 are equipped with a main control chip 3, and the handheld terminal 1 1 and the main control terminal 2 both use the STM32F103R8 chip as the core control chip. The chip has 68K Flash memory and is packaged in a 64-pin patch. The Flash capacity and the number of I / O interfaces in the chip basically meet the functional requirements of the hand-held controller. The main control chips 3 at both ends carry out data transmission through the wireless communicator 12, and the wireless communicator 12 uses the nRF24L01 chip as the wireless communication device. The chip can realize the wireless control of the pole-climbing robot. It is easy to use and easy to operate. The handheld terminal 1 uses a battery as the power supply, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More