

Unmanned device formation method, storage device and processing device
A technology of unmanned equipment and distribution methods, applied in two-dimensional position/channel control, etc., can solve the problems of long overall time and uncompetitive conditions, so as to increase robustness and stability, and ensure reliability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
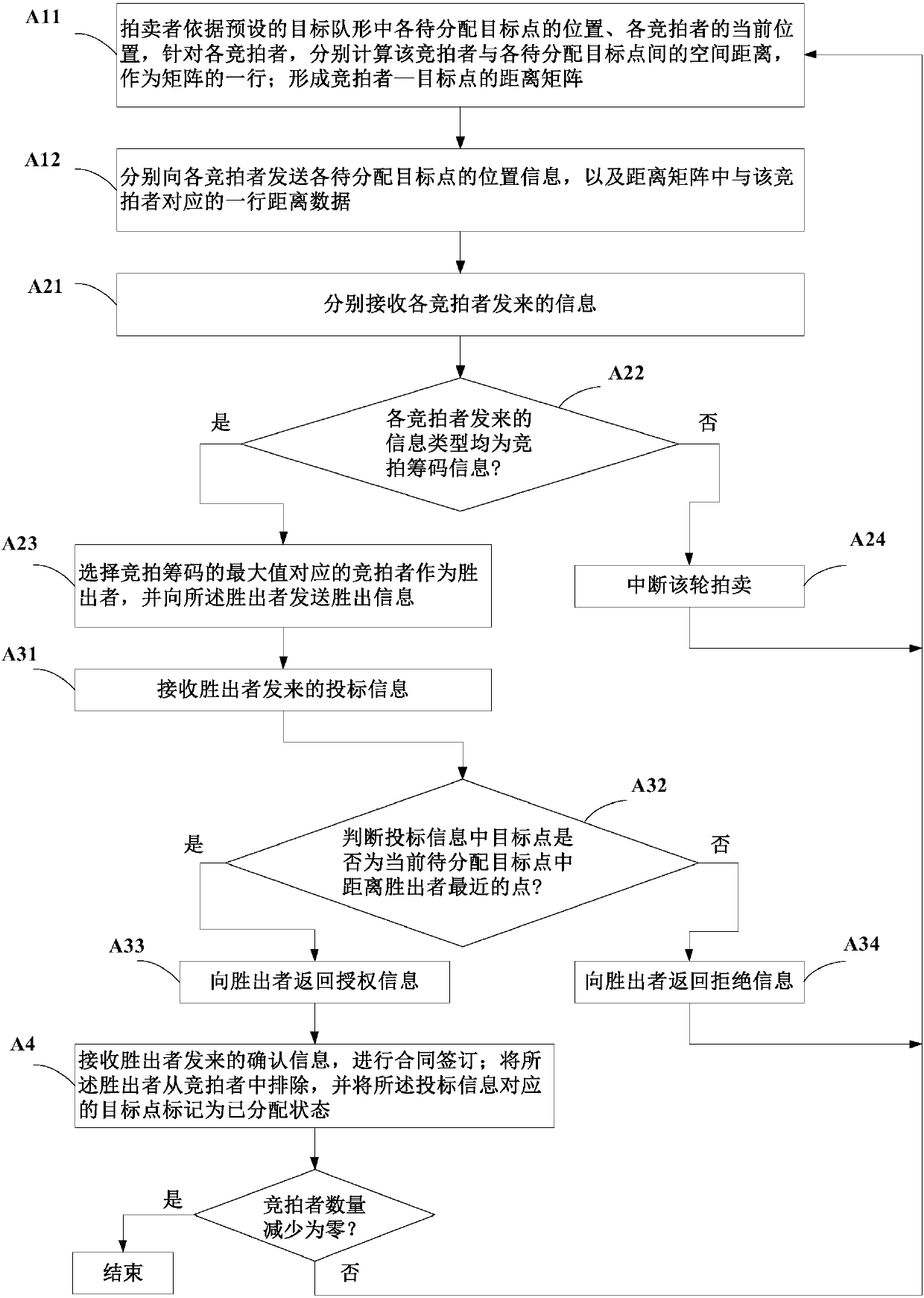
[0066] Such as figure 2 As shown, this embodiment allocates target points based on the auction negotiation mechanism, specifically:
[0067] Step A11, according to the position of each target point to be allocated in the preset target formation and the current position of each bidder, the auctioneer calculates the bidder and each target point to be allocated for each bidder The spatial distance between, as a row of the matrix; form the bidder-target point distance matrix;
[0068] Step A12, sending the location information of each target point to be allocated to each bidder, and a row of distance data corresponding to the bidder in the distance matrix;
[0069] After each bidder receives the location information of the target points to be allocated from the auctioneer, as well as the distance between himself and these target points, he must check whether these distance values are correct; The sum of the distances between the target points will get a bidding chip and send ...
Embodiment 2
[0089] Similar to Embodiment 1, the difference is that it also includes after step A4:
[0090] Step A5, receiving the information about traveling to the corresponding target point sent by the winner.
[0091] After executing A5, it turns to step A11 to start the next round of auction until the number of bidders is reduced to zero.
[0092] This embodiment is applicable to the situation where the distance between the unmanned driving equipment to be formed and the distance between the target points to be allocated are relatively short. After the auction of a target point, wait for the winner to drive to the corresponding target point before starting next round of auction. Because when multiple unmanned vehicles drive to their respective target points at the same time, frequent obstacle avoidance and braking operations may occur in order to avoid collisions, resulting in prolonged formation time.
[0093] In Embodiment 1 and Embodiment 2, in step A11, if each of the unmanned ...
Embodiment 3
[0095] In this example, if image 3 As shown, in order to simplify the process, the target point allocation method adopted is as follows:
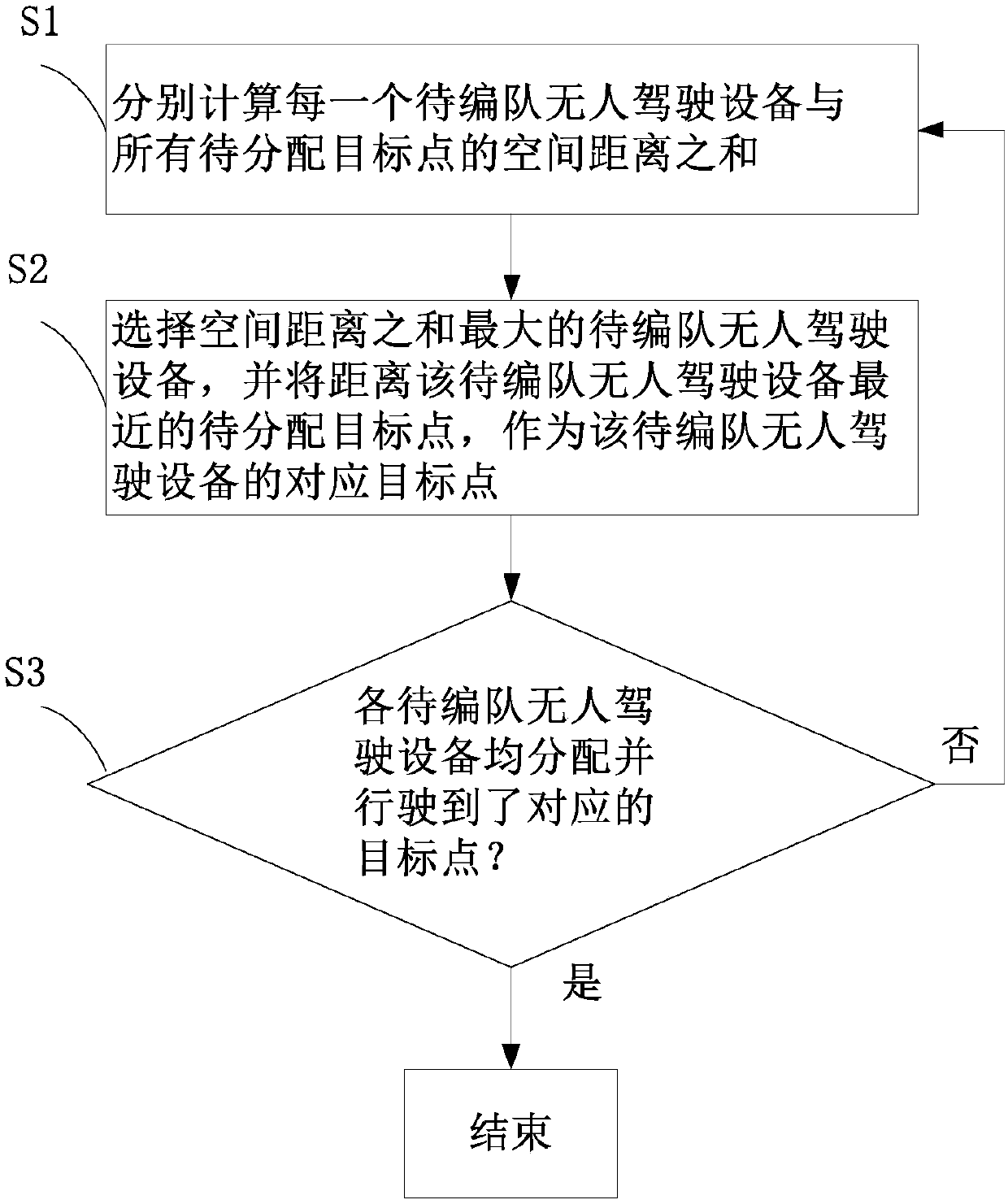
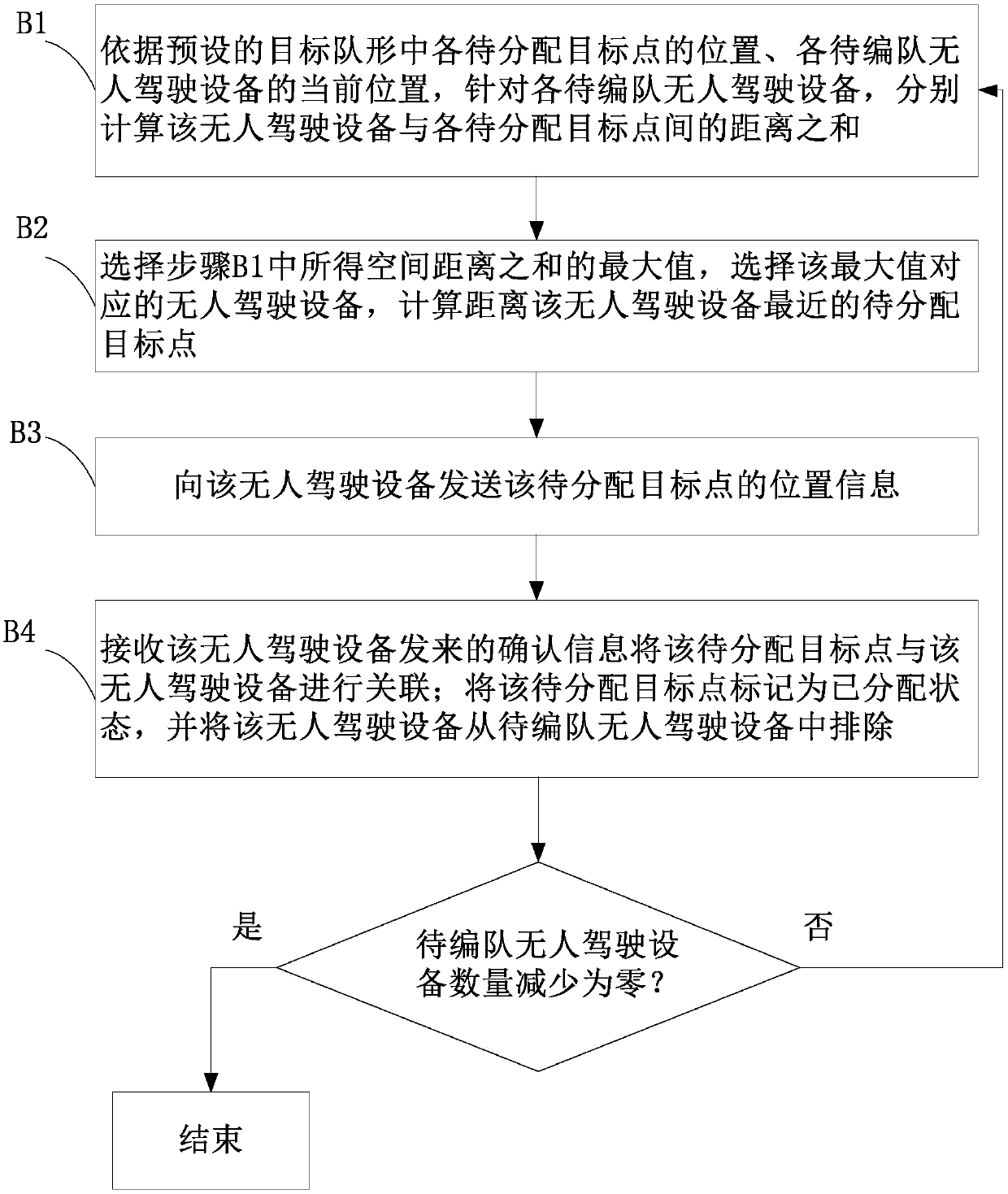
[0096] Step B1, according to the position of each target point to be assigned in the preset target formation and the current position of each unmanned device to be formed, for each unmanned device to be formed, respectively calculate the unmanned equipment and the sum of the spatial distances between the target points to be allocated;
[0097] Step B2, select the maximum value of the sum of the spatial distances obtained in step B1, select the unmanned device corresponding to the maximum value, and calculate the target point to be allocated closest to the unmanned device;
[0098] Step B3, sending the location information of the target point to be allocated to the unmanned device;
[0099] Step B4, receiving the confirmation message sent by the unmanned device, associating the target point to be allocated with the unmanned device; markin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More