

Kinect-based pallet dynamic identification and location method and system, and medium
A technology of dynamic identification and positioning method, which is applied in image data processing, instruments, calculations, etc. It can solve problems such as high lighting conditions, lower industrial product costs, and difficult monocular cameras, etc., to achieve accurate positioning and strong robustness , good dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
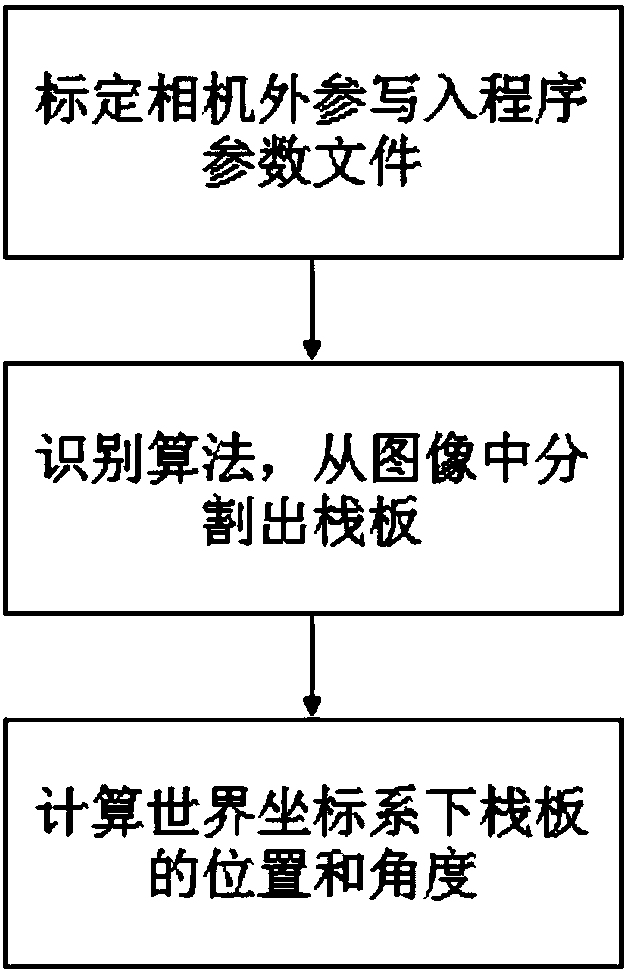
[0042] Such as figure 1 As shown, the present invention discloses a kind of pallet dynamic identification and positioning method based on Kinect, comprising the following steps:
[0043] Step 1: The Kinect sensor calculates the transformation matrix from the camera coordinate system to the world coordinate system by collecting the depth data of the ground and combining the internal parameters of the camera;
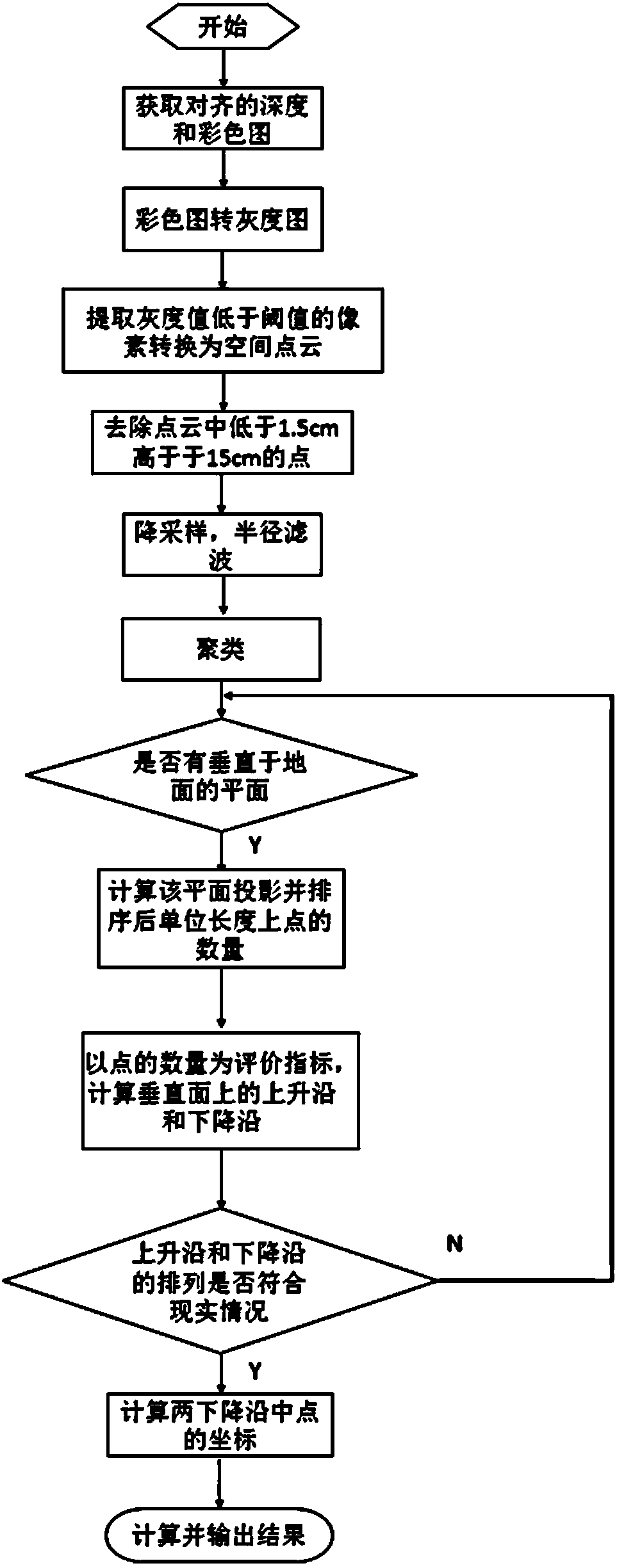
[0044] Step 2: Acquire color and depth images through Kinect, align the pixels in the color image and depth image, traverse the pixels, filter valid data points according to grayscale and depth data and convert them into spatial 3D point clouds;
[0045] Step 3: Preprocessing the point cloud obtained in step 2;
[0046] Step 4: Perform Euclidean clustering on the point cloud obtained in step 3 to obtain one or more clustered objects;
[0047] Step 5: Process the clusters obtained in step 4, and extract the feature planes parallel to the normal vector of the ground equat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More