

Dynamic measurement gripper with space two-freedom-degree telescopic function and method of dynamic measurement gripper
A technology of dynamic measurement and degrees of freedom, which is applied to conveyor objects, furnaces, lighting and heating equipment, etc., can solve the problem of insufficient ability to grasp various specifications of glass, save takt time, improve efficiency, and ensure stability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] In order to describe the technical content of the present invention more clearly, further description will be given below in conjunction with specific embodiments.
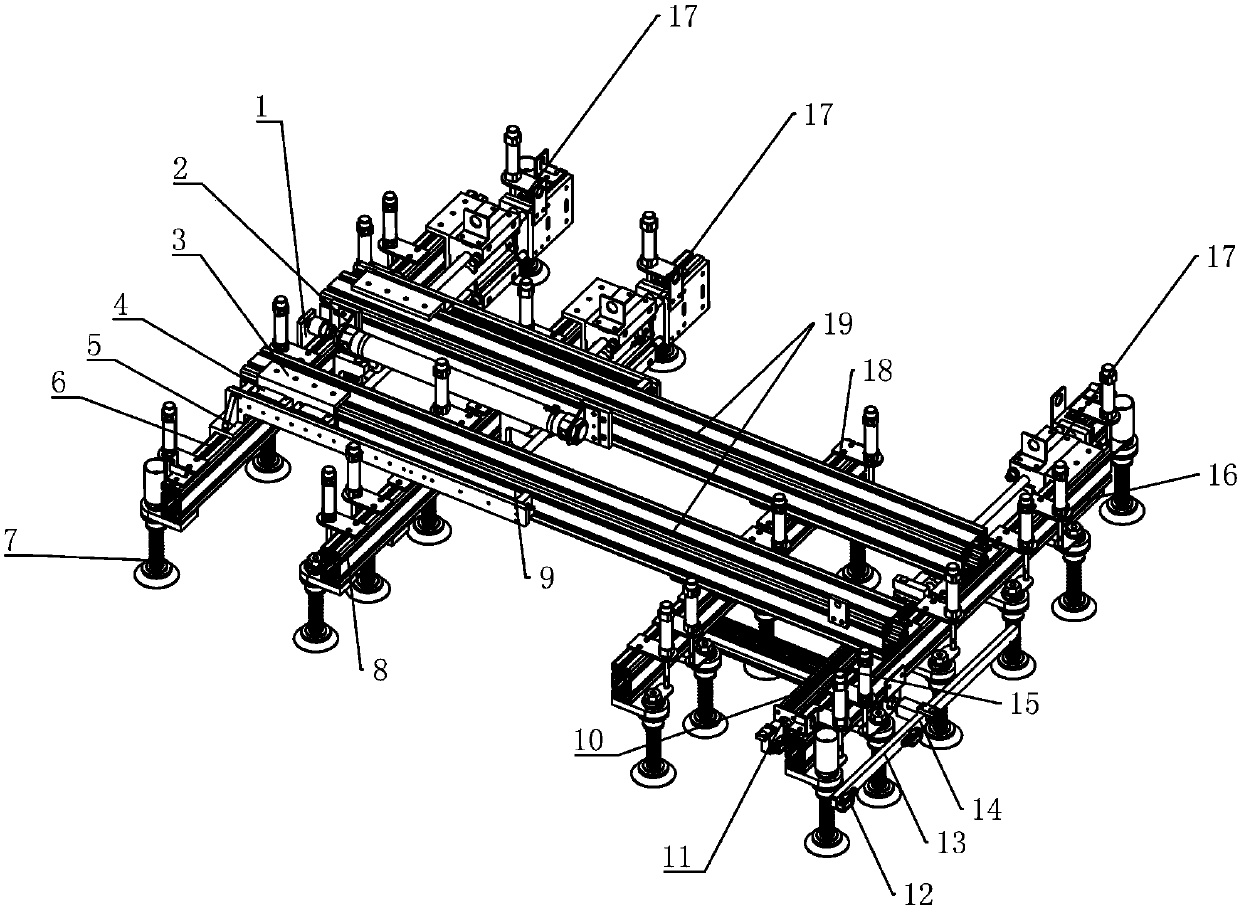
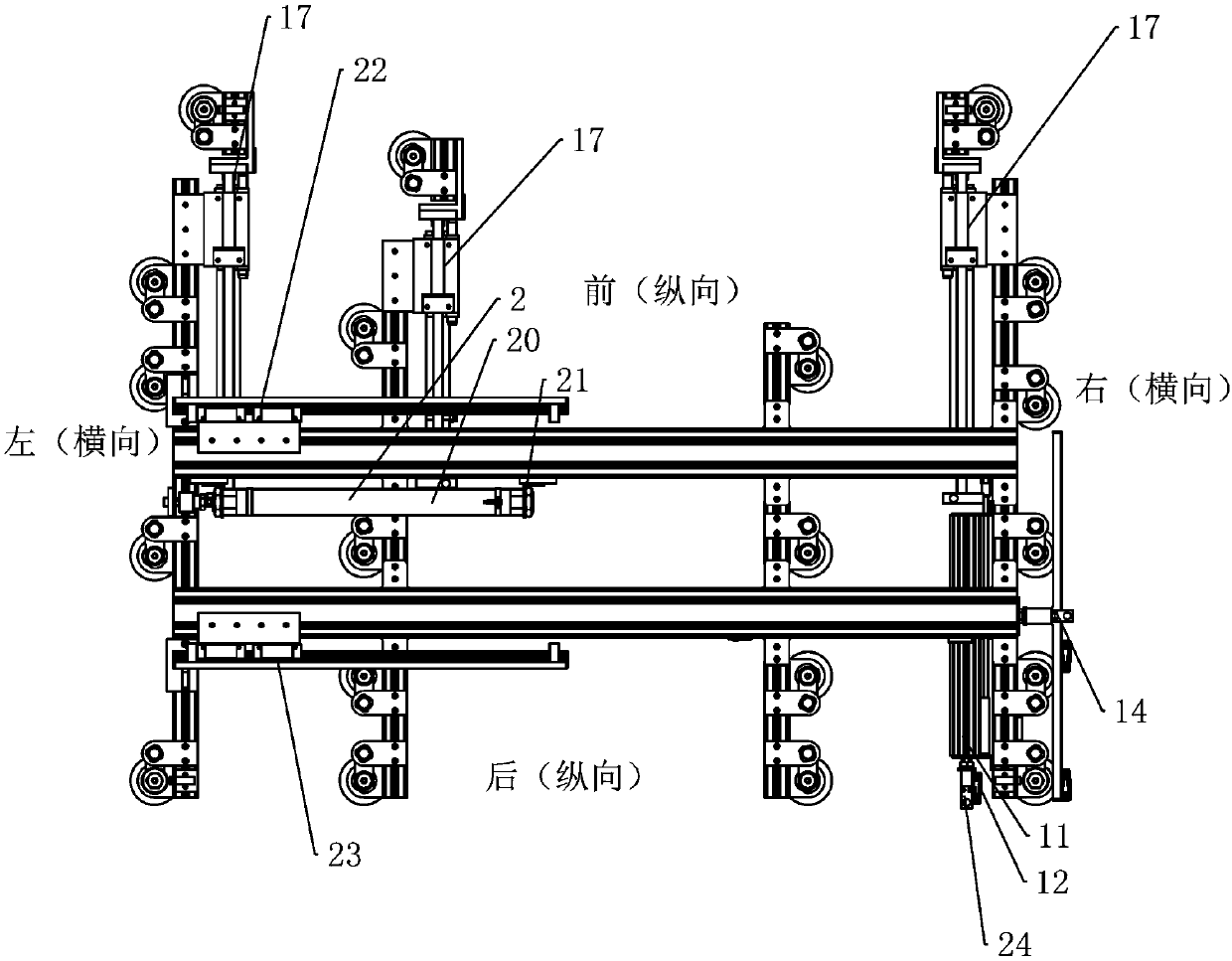
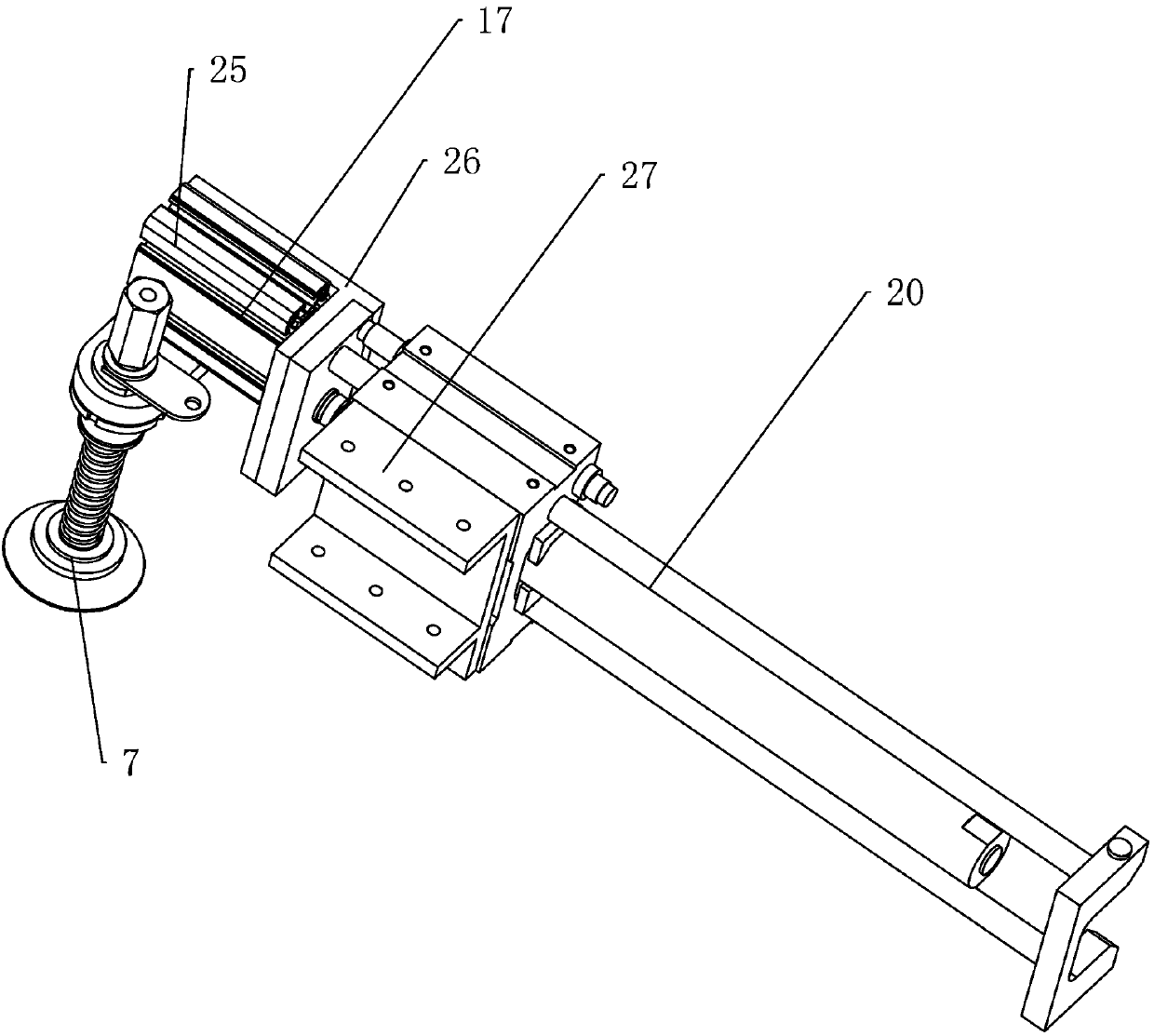
[0062] The dynamic measurement gripper with space two-degree-of-freedom telescopic function is used for heavy-duty robots. Its main feature is that it includes a body and a measurement system. The body is a structural frame with telescopic functions in two directions, and A gripping device is arranged on the body, and the measurement system is arranged on the body to measure the expansion and contraction in two directions to determine the position of the object grasped by the dynamic measurement gripper.
[0063] In a preferred embodiment, the main body includes a main beam 19, a fixed auxiliary beam, a telescopic auxiliary beam 6 and a telescopic mechanism, and the fixed auxiliary beam includes first fixed auxiliary beams 16 arranged parallel to each other , the second fixed auxiliary beam and the third fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More