

Robot capable of carrying out equilibrium running
A technology of balanced operation and robotics, applied in the field of robotics, can solve the problem of heavy weight of the robotic arm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below in conjunction with specific embodiments and accompanying drawings.
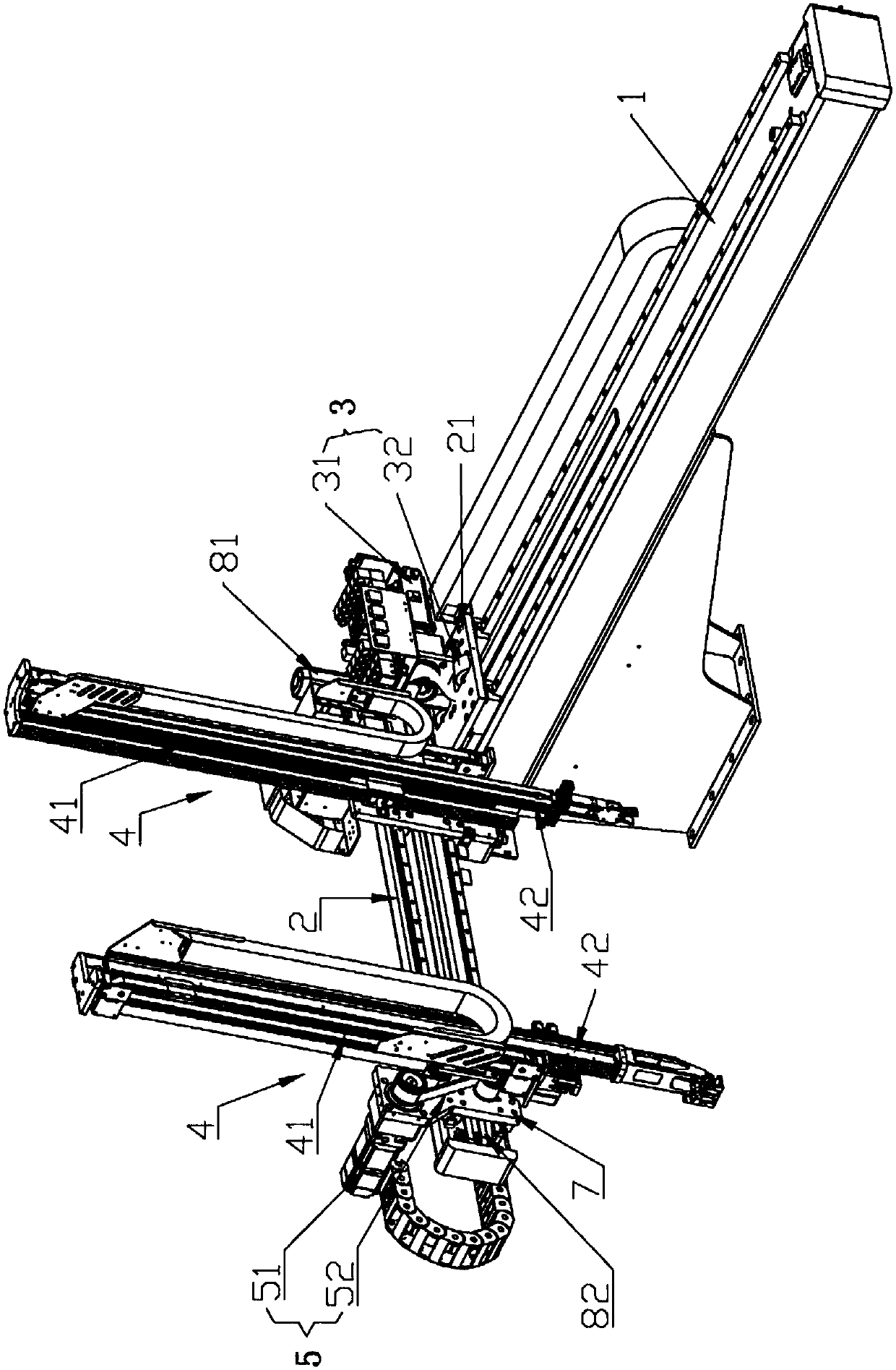
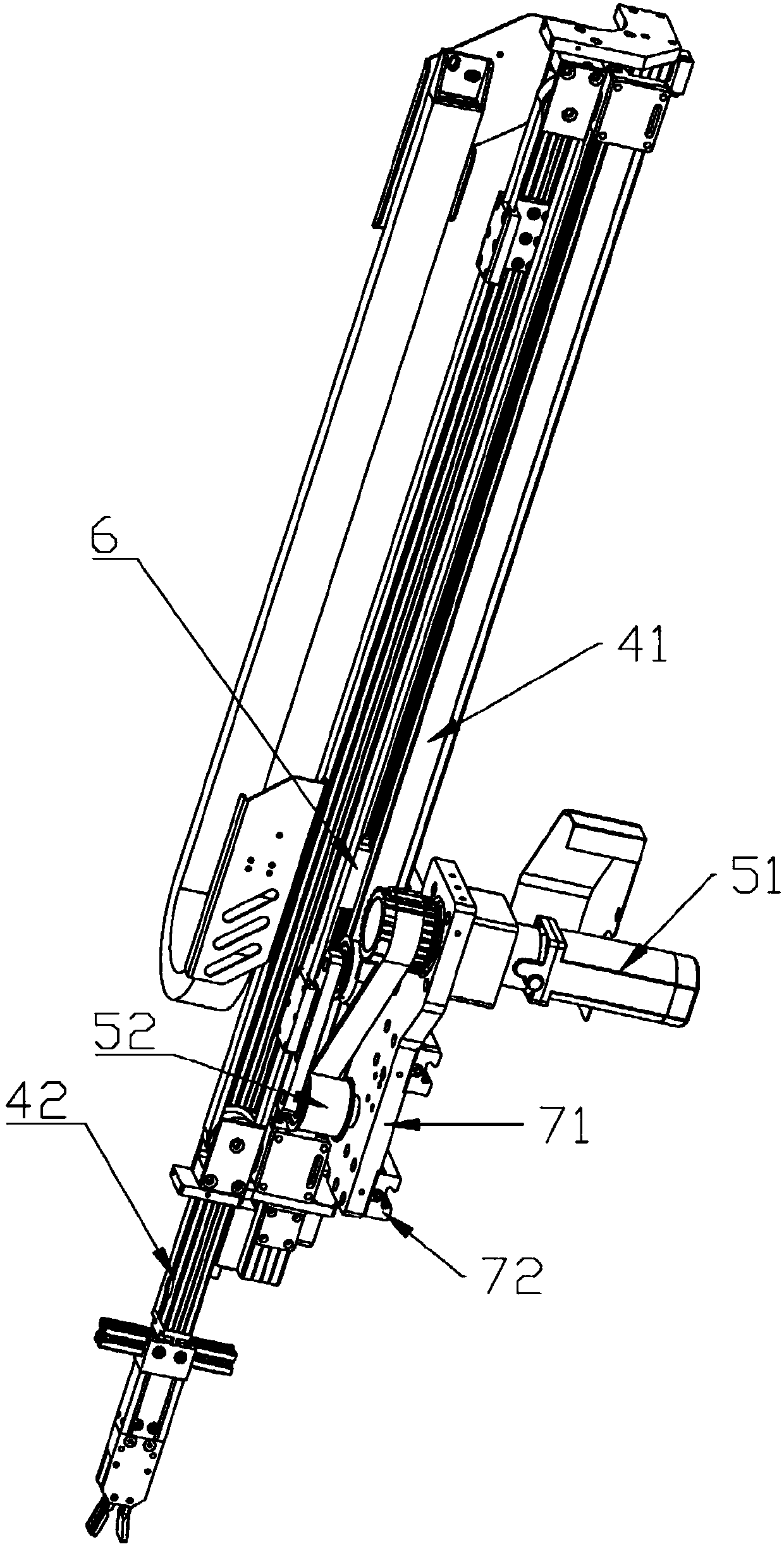
[0030] A kind of robot of balanced operation of the present embodiment, such as Figure 1 to Figure 5 As shown, there are X-axis slide rails 2 and Y-axis slide rails 1 that are distributed transversely and are perpendicular to each other. One end of the X-axis slide rail 2 is slidably mounted on the Y-axis slide rail 1 , and the other end is suspended. It also includes a first drive mechanism 3 for driving the X-axis slide rail 2 to move along the Y-axis slide rail 1 , and the first drive mechanism 3 is installed on the Y-axis slide rail 1 . The X-axis slide rail 2 is provided with a connecting plate 21, and the X-axis slide rail 2 is connected with the Y-axis slide rail 1 through the connecting plate 21. The first drive mechanism 3 includes a matching first motor 31 and a first pulley assembly 32 , the first motor 31 is disposed on the Y-axis s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More