

Time and frequency domain mixed identification method of non-cooperative target motion and inertial parameters
A non-cooperative target and inertial parameter technology, applied in the field of time-frequency domain hybrid identification of non-cooperative target motion and inertial parameters, can solve the problems of long processing time, unknown motion state and inertial parameters, unfavorable identification accuracy and fuel consumption, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0112] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0113] In order to achieve the above object, the technical solution adopted in the present invention comprises the following steps:
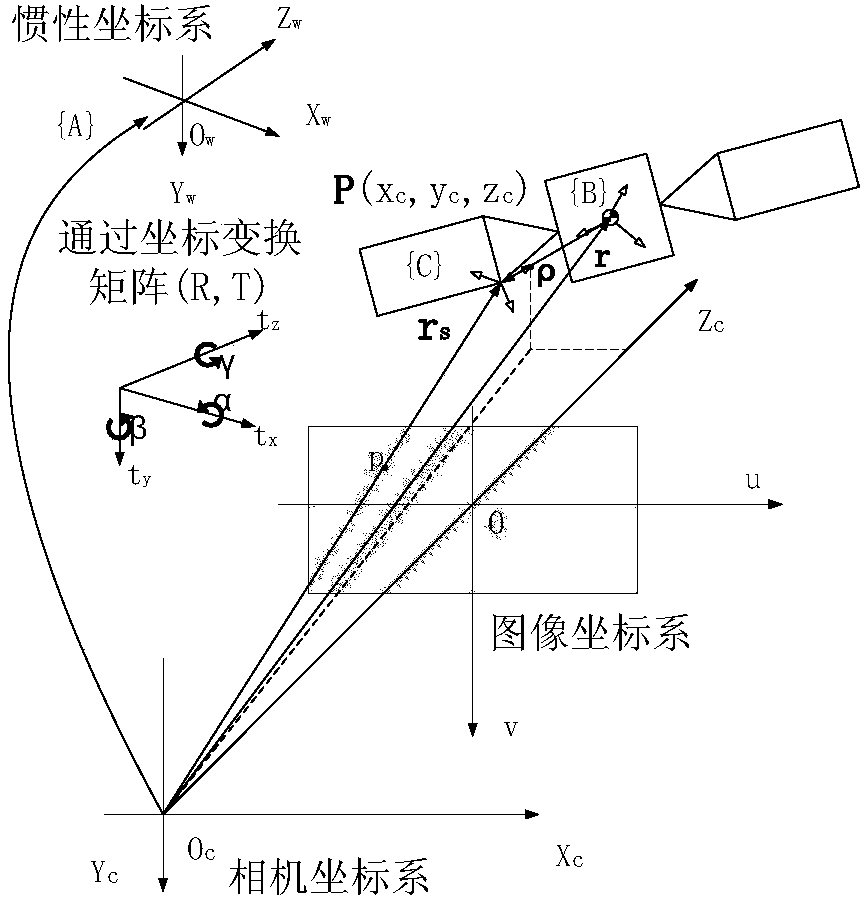
[0114] 1) The relative pose information of the non-cooperative target obtained by the visual camera
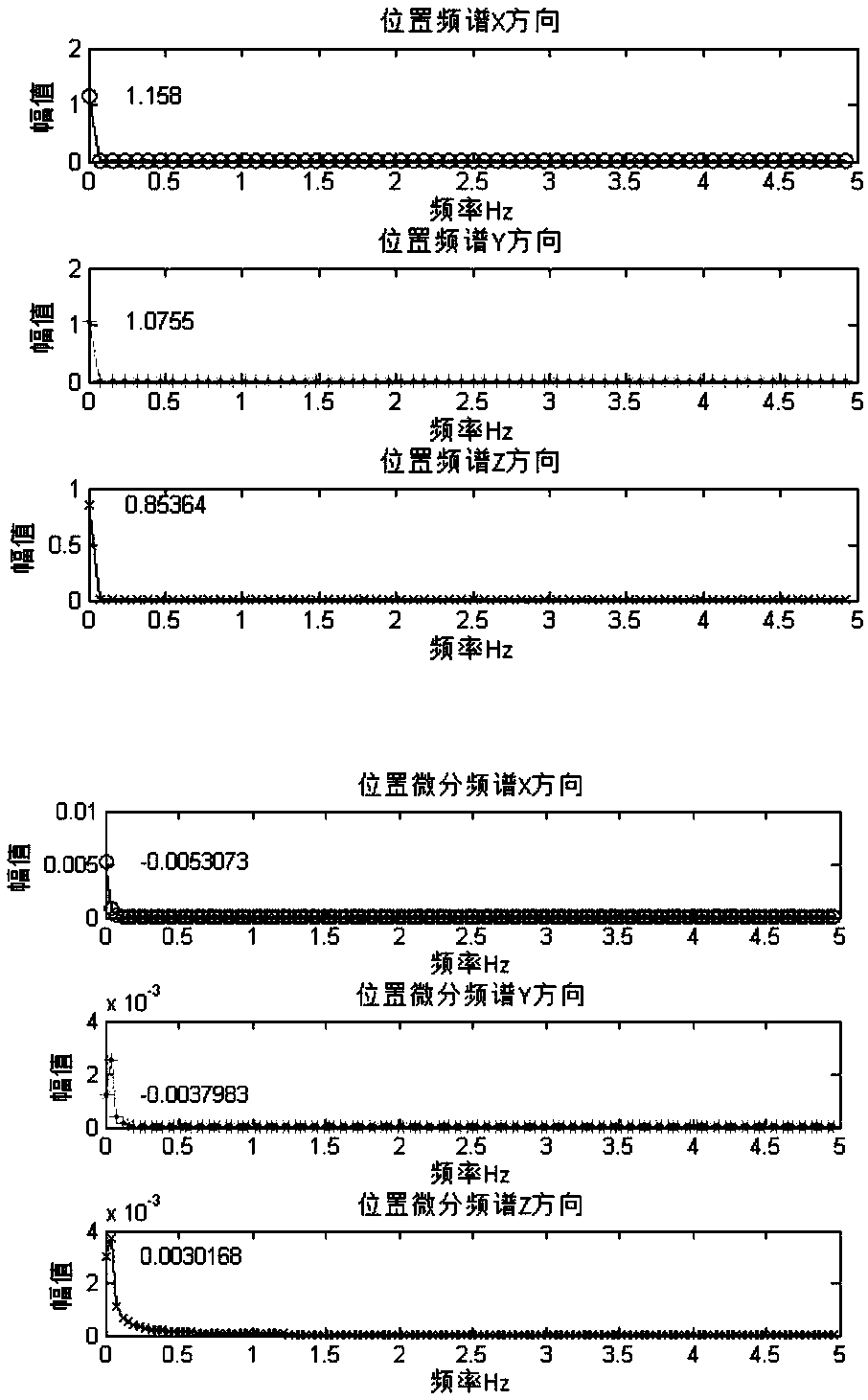
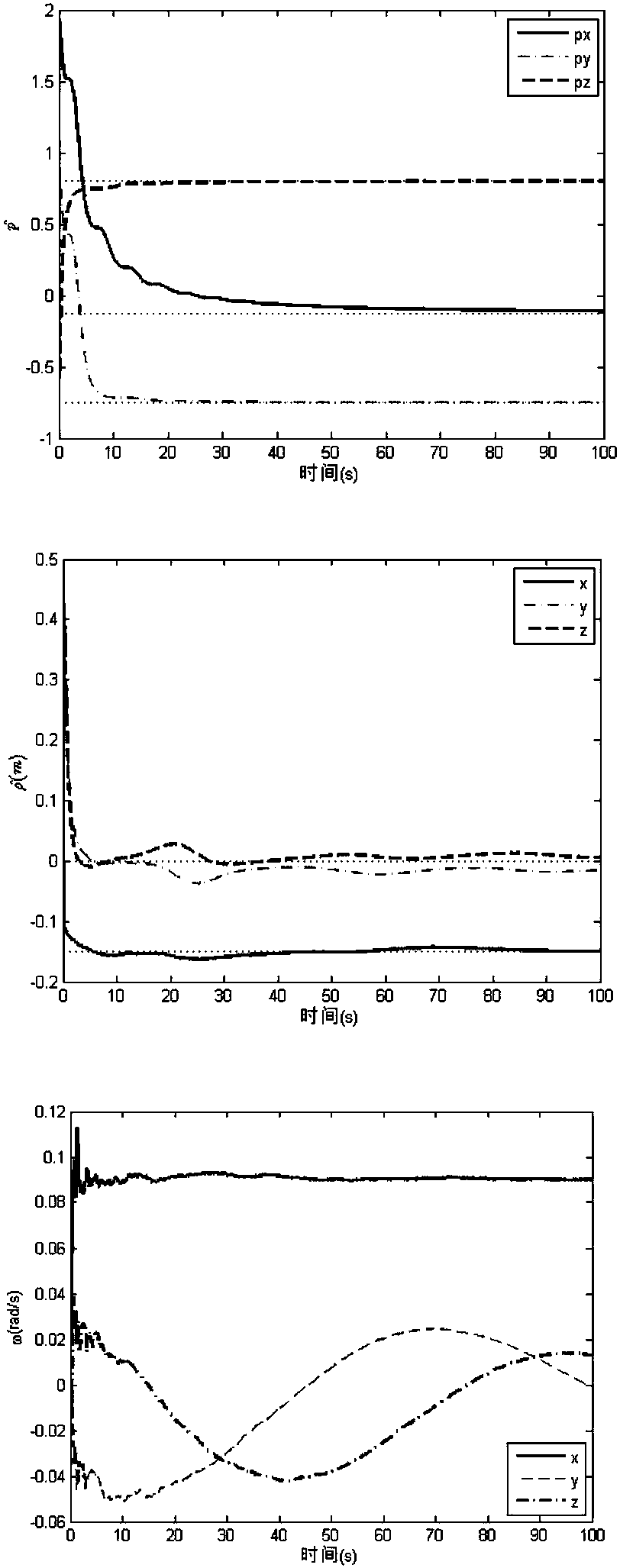
[0115] 2) According to the target pose information obtained by the visual camera and the spacecraft motion equation, the frequency-domain optimal filter is used to estimate the centroid position and translational velocity of the non-cooperative target.
[0116] 3) According to the target pose information obtained by the visual camera and the spacecraft motion equation, the extended finite impact corresponding filter is used in the time domain to estimate the motion angular velocity and inertia parameters of the non-cooperative target.
[0117] In described step 1), the specific steps of calculating the coordinates of the target in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More