

Method and system for controlling plurality of mobile robots to operate in parallel manner
A mobile robot, control terminal technology, applied in the control/regulation system, non-electric variable control, two-dimensional position/channel control and other directions, can solve the problem of affecting the operation efficiency of the system, occupying large message communication channels, etc., to improve the operation efficiency , the effect of avoiding stateful interactions and reducing message traffic
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solutions of the present invention will be further specifically described below through the embodiments of the present invention and in conjunction with the accompanying drawings.
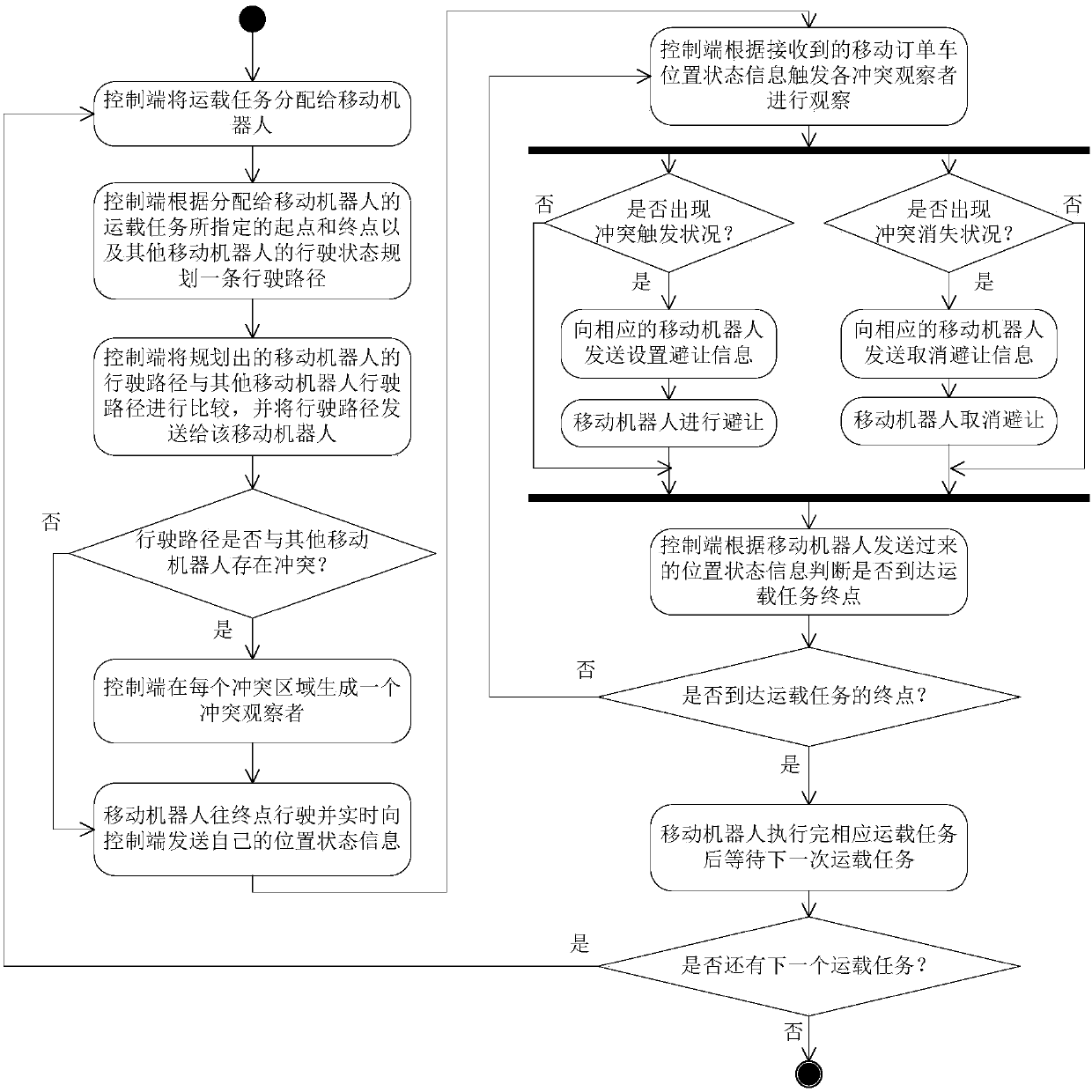
[0030] figure 1 It is a schematic flowchart of an embodiment of a method for controlling multiple mobile robots to run concurrently proposed by the present invention, which specifically includes the following steps:
[0031] 1) The control terminal assigns the carrying task to the mobile robot; the carrying task in this embodiment is converted according to the inventory operation order;
[0032] 2) The control end plans a driving path according to the starting point and end point specified by the carrying task assigned to the mobile robot and the driving state of other mobile robots; walking section) or path planning based on the principle of the shortest path;
[0033] 3) The control end compares the travel path of the assigned mobile robot obtained in step 2) with the trave...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More