

GNSS precise positioning method based on multi-dimensional particle filter deviation estimation
A particle filtering and precise positioning technology, which is applied in the field of satellite positioning system and positioning measurement, and can solve the problems of prolonged positioning time of observation data and intractable error value change.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
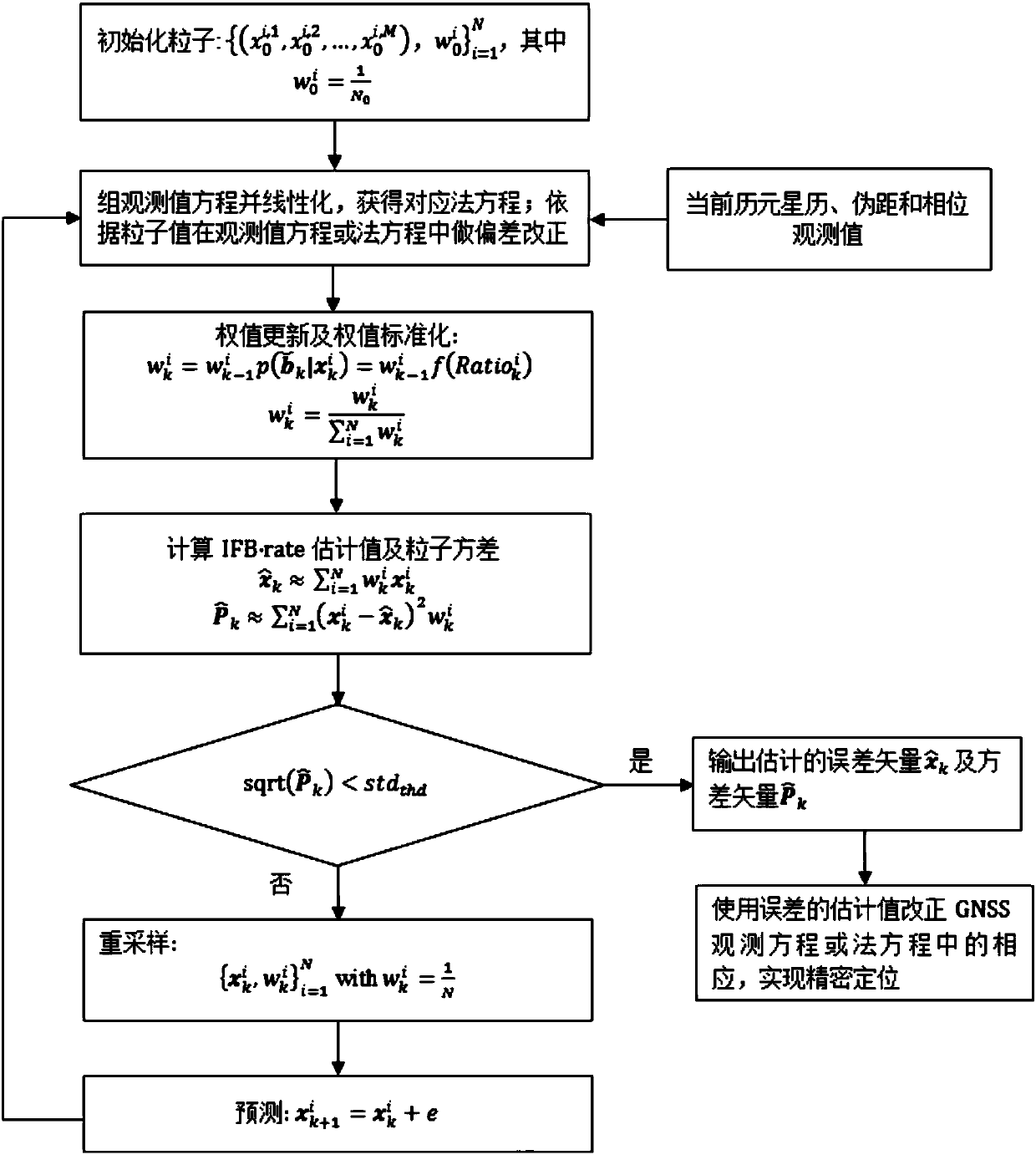
[0079] Such as figure 1 As shown, a GNSS precise positioning method based on multidimensional particle filter bias estimation includes the following steps:
[0080] Step 1: Preprocess the satellite navigation data, import satellite ephemeris, current epoch pseudo-range observations and current epoch phase observations;
[0081] Usually preprocessing includes data format conversion, gross error detection and elimination, cycle slip detection and repair, etc.
[0082] Step 2: Establish and linearize the observation value equation containing multiple error parameters to obtain the single epoch method equation or the previous epoch accumulation method equation.
[0083] The pseudo-range non-difference observation equation of GNSS system is:
[0084]
[0085] The phase non-difference observation equation of GNSS system is:
[0086]
[0087...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More