

Real-time tracking and precise estimation method of glonass phase-frequency deviation based on particle filter
A phase-to-frequency deviation and real-time tracking technology, which is applied in the field of satellite positioning system and positioning measurement, can solve the problems of not being able to quickly obtain GLONASS fixed solutions, affecting the entire cycle characteristics of GLONASS phase observation values, and GLONASS ambiguity cannot be fixed, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
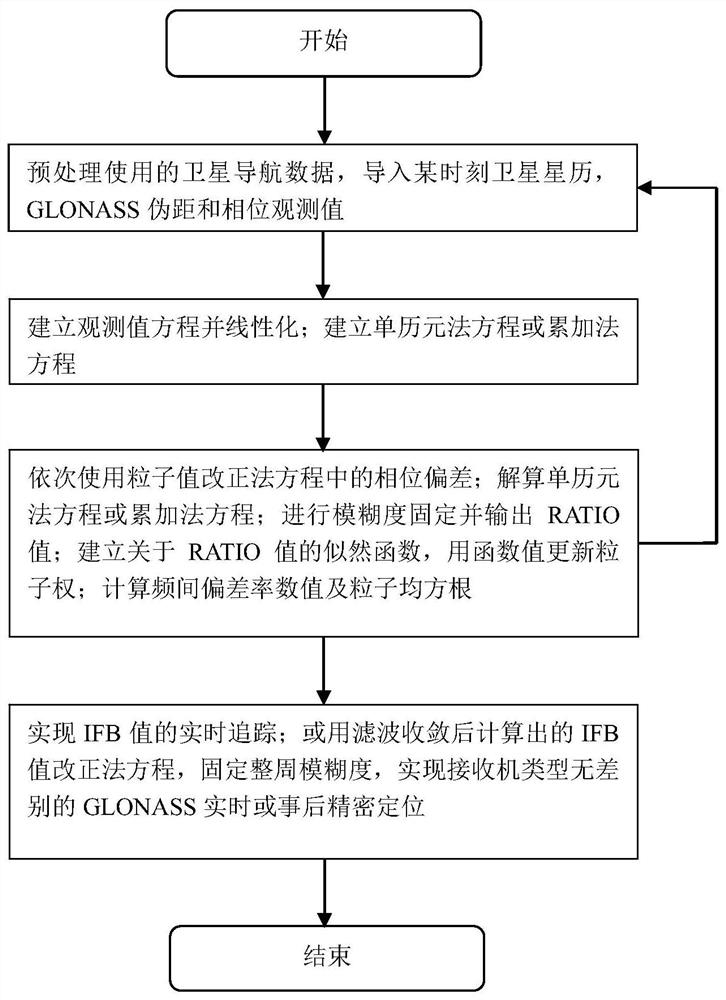
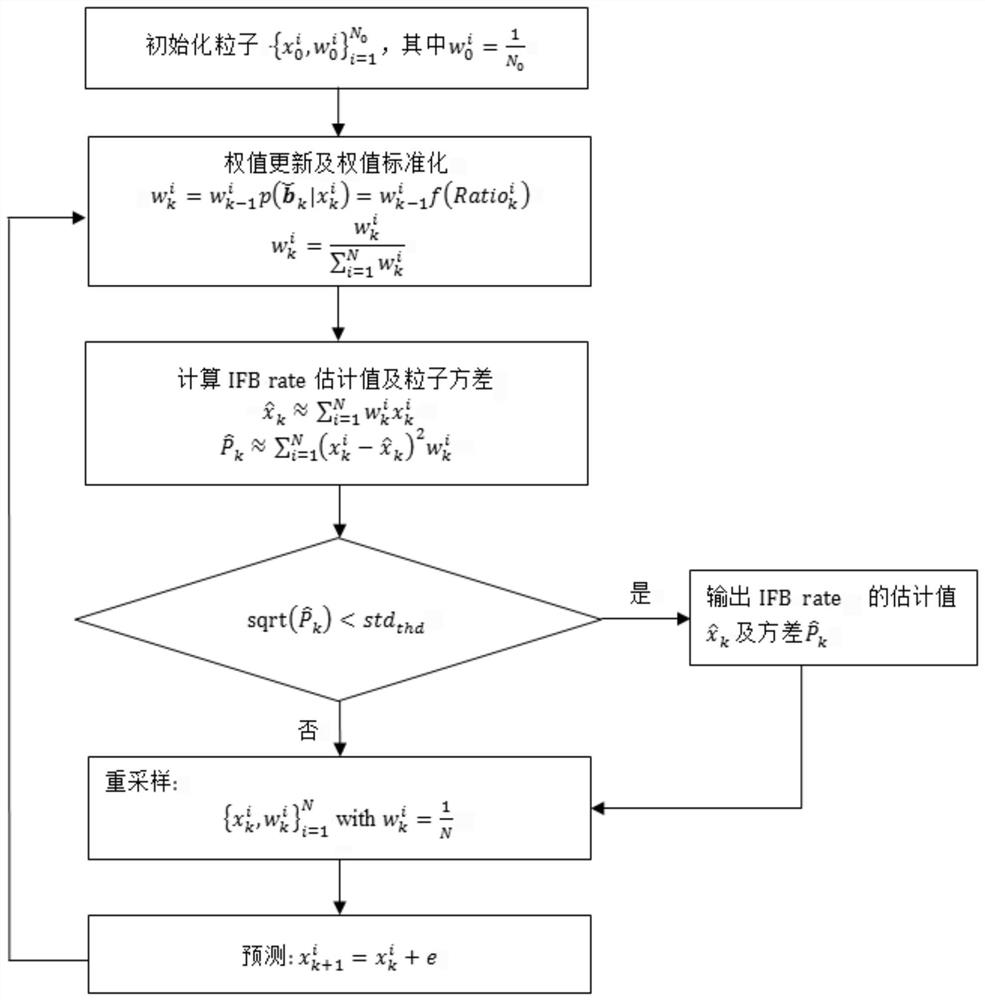
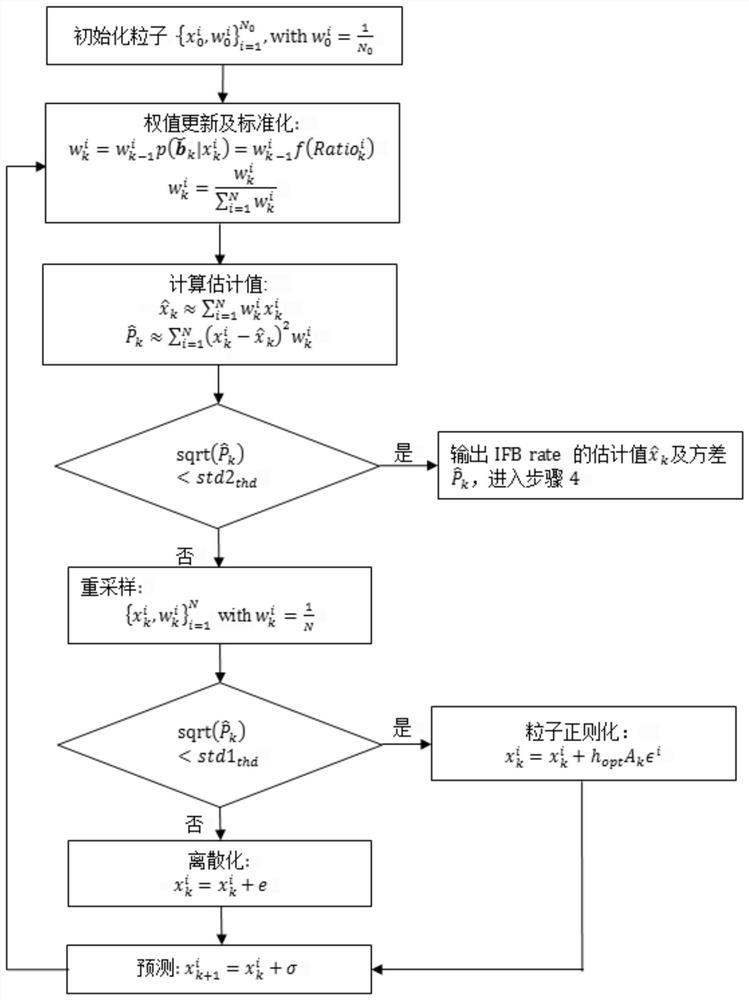
[0083] like Figure 1-3 As shown, a method for real-time tracking and precise estimation of GLONASS phase-frequency deviation based on particle filter includes the following steps:
[0084] Step 1: Preprocess the satellite navigation data, import the satellite ephemeris, the pseudo-range observation value and phase observation value of the current historical cloud;
[0085] Usually preprocessing includes data format conversion, gross error detection and elimination, cycle slip detection and repair, etc.
[0086] The pseudorange non-difference observation equation of GLONASS can be expressed as:
[0087]
[0088] The phase non-difference observation equation of the GLONASS system is:
[0089]
[0090] In the formula: i is the serial number of the satellite, a is the serial number of the observation station, P is the non-difference pseud...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More