Robot plume tracking method based on continuous state behavioral domain intensive learning
A continuous state, reinforcement learning technology, applied in neural learning methods, instruments, manipulators, etc., can solve problems such as high cost, less judgment, and inability to adapt to the environment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] The robot plume tracking method based on reinforcement learning in the continuous state behavior domain proposed by the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
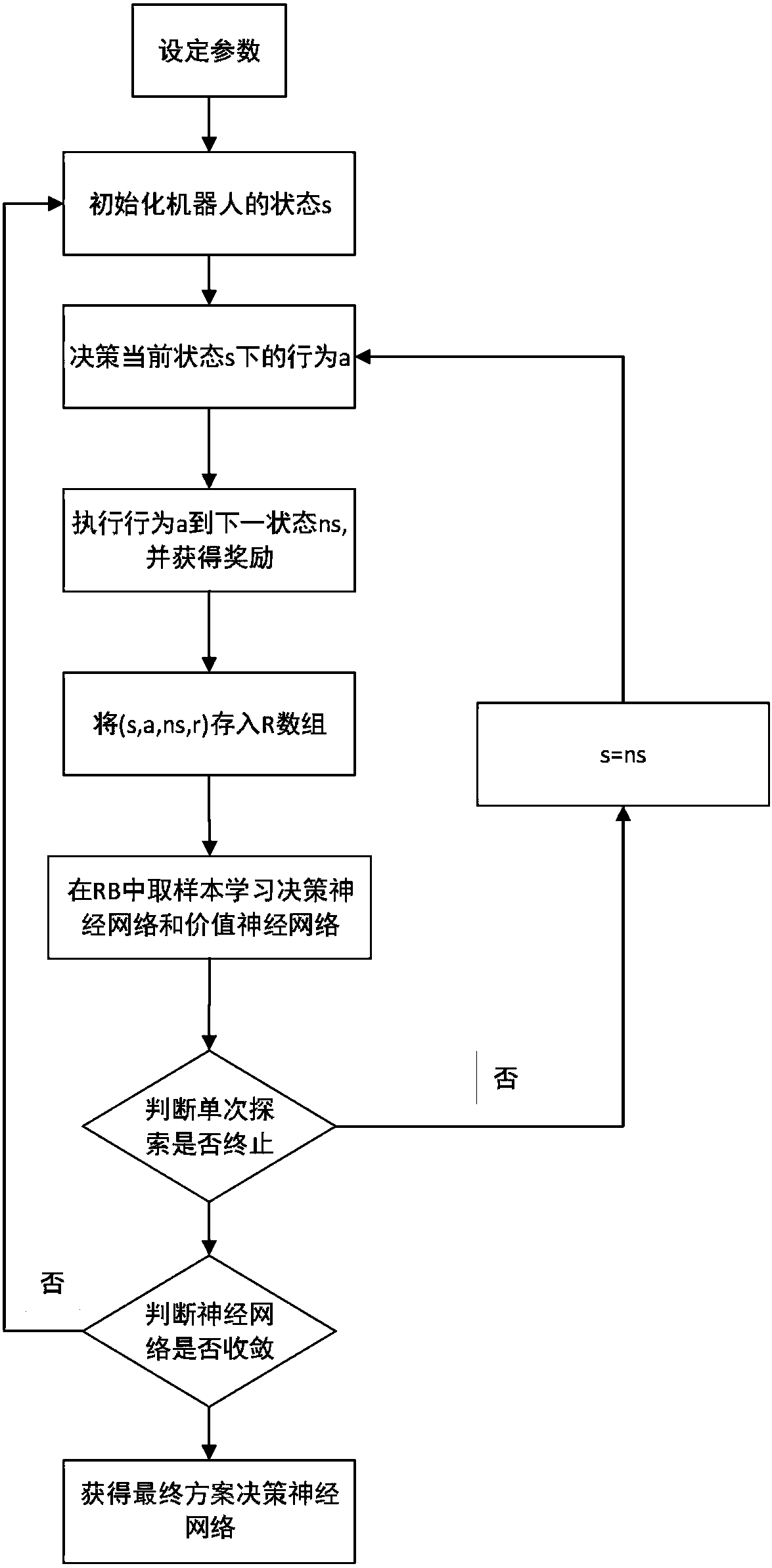
[0083] The robot plume tracking method based on continuous state behavior domain reinforcement learning proposed by the present invention describes the robot plume tracking process by using sequence decision-making. At the initial moment, the underwater robot will obtain the current deep-sea environmental information, including signals detectable by sensors such as the current velocity in the deep sea and the concentration of hydrothermal plume signals. Combine these signals into the state vector required for single-step path planning, input the state vector into the current decision-making neural network, and the decision-making neural network outputs the direction of the robot at this moment. After the robot runs at a c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More