

Full-domain magnetic compass course error correcting method and navigation error correcting method for autonomous underwater vehicle (AUV)
A heading error and magnetic compass technology, which is applied in the field of underwater unmanned autonomous vehicle navigation, can solve the problems that the navigation filtering algorithm is difficult to effectively improve the navigation accuracy, difficult to meet the requirements of cost control, reliability and applicability discount, etc. To achieve the effect of easier operation, easy realization and wide application range of parameter adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
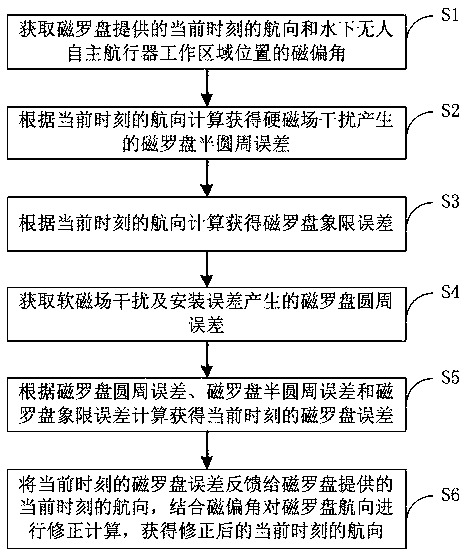
[0048] This embodiment provides a global magnetic compass heading error correction method, which is suitable for when the position of the underwater unmanned autonomous vehicle's working area changes greatly, that is, it can be applied in the global range, such as figure 1 shown, including the following steps:
[0049] S1. Obtain the current heading provided by the magnetic compass and the magnetic declination of the working area of the underwater unmanned autonomous vehicle;
[0050] S2. According to the heading calculation at the current moment, the magnetic compass semicircle error generated by the hard magnetic field interference is obtained;
[0051] S3. Calculate and obtain the quadrant error of the magnetic compass according to the heading at the current moment;
[0052] S4. Obtain the magnetic compass circumference error caused by soft magnetic field interference and installation error;
[0053] S5. Calculate and obtain the magnetic compass error at the current mom...
Embodiment 2
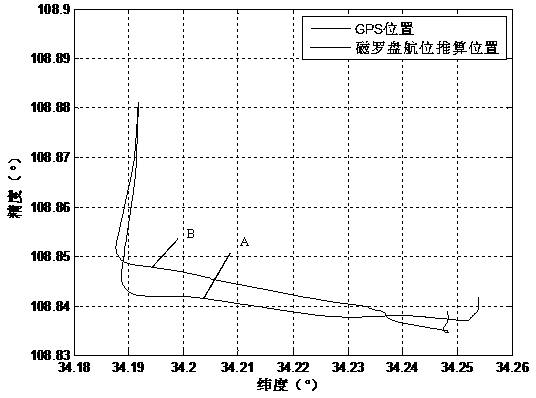
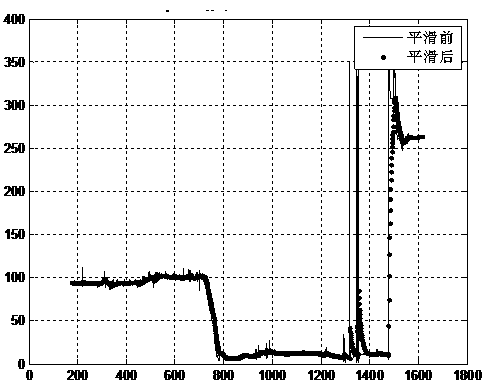
[0080] This embodiment provides a navigation error correction method for an underwater autonomous vehicle. Before the underwater autonomous vehicle introduces the heading information into the dead reckoning algorithm, the magnetic compass is first compensated for the magnetic field, the magnetic declination angle is corrected, and the error angle is installed. correction, and then pass the corrected heading information through After filtering and smoothing, dead reckoning is introduced, which specifically includes the following steps:
[0081] S2-1. Using the global magnetic compass heading error correction method in Embodiment 1 to obtain the heading;
[0082] S2-2. Introduce the heading into the dead reckoning to obtain the latitude and longitude values. Among them, the heading angle direction of the underwater unmanned autonomous vehicle involved is defined as positive by north by west, and the range is 0°~360°.
[0083] Preferably, in step S2-2, the calculation formula ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More