

ARM-based crawler type mobile robot
A mobile robot, ARM processor technology, applied in the field of robots, can solve problems such as difficulty in rework, and achieve the effects of rapid response, simple structure and good shooting effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The invention provides an ARM-based crawler-type mobile robot. The invention has the advantages of simple structure, convenient use, multiple functions, can realize front and back walking, quick response and good shooting effect.
[0014] The technical solutions in the embodiments of the present invention will be described clearly and in detail below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
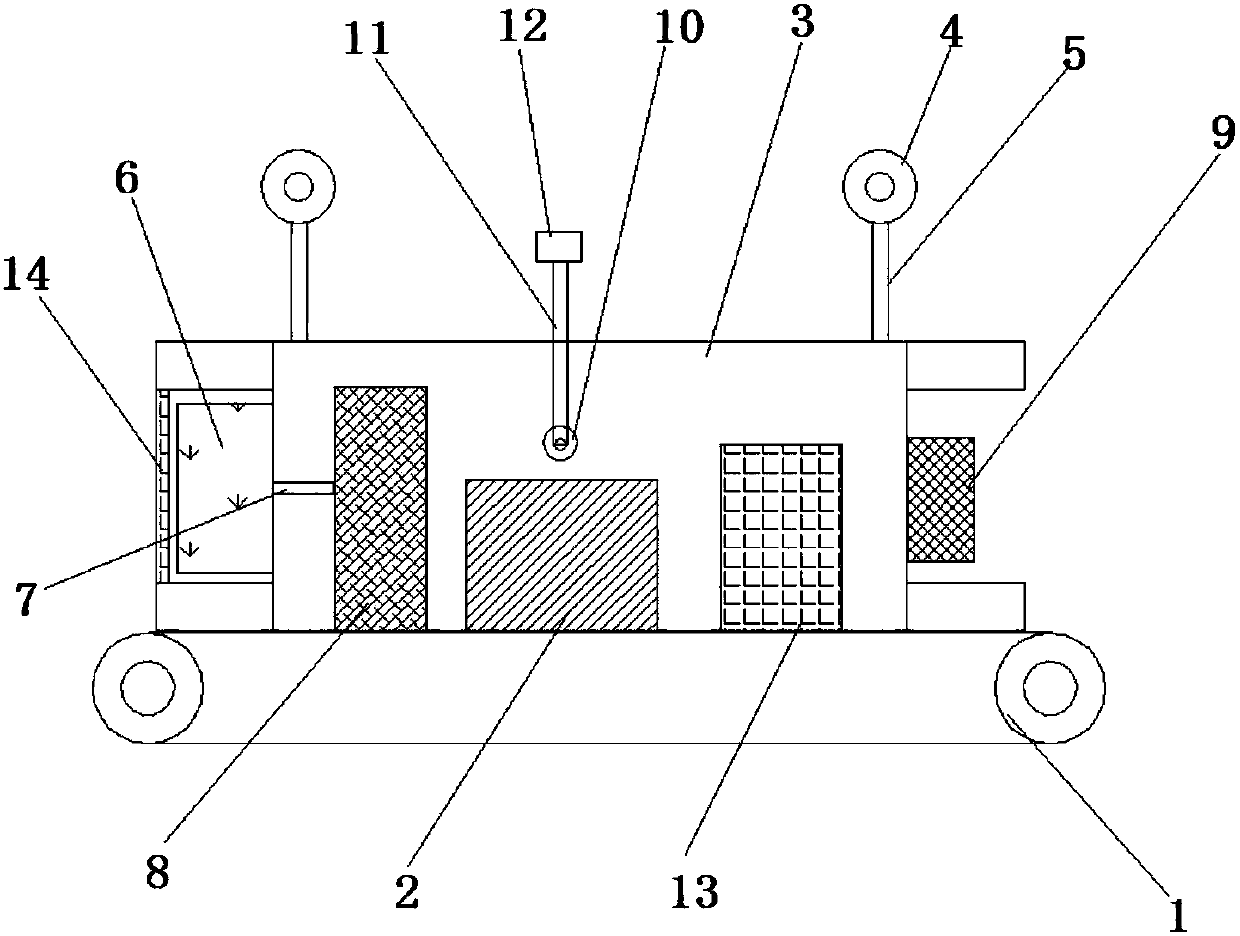
[0015] Such as figure 1 The crawler-type mobile robot based on ARM shown includes a crawler walking mechanism 1, an ARM processor 2, a body 3, an auxiliary walking wheel 4, an auxiliary walking strut 5, a gas colle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More