

Attitude measurement method of noninertial system vision and dual-gyroscope multirate CKF fusion
A non-inertial system and measurement method technology, applied to navigation, measurement devices, instruments, etc. through speed/acceleration measurement, can solve problems such as unrealistic measurement, and achieve the effect of increasing system reliability and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
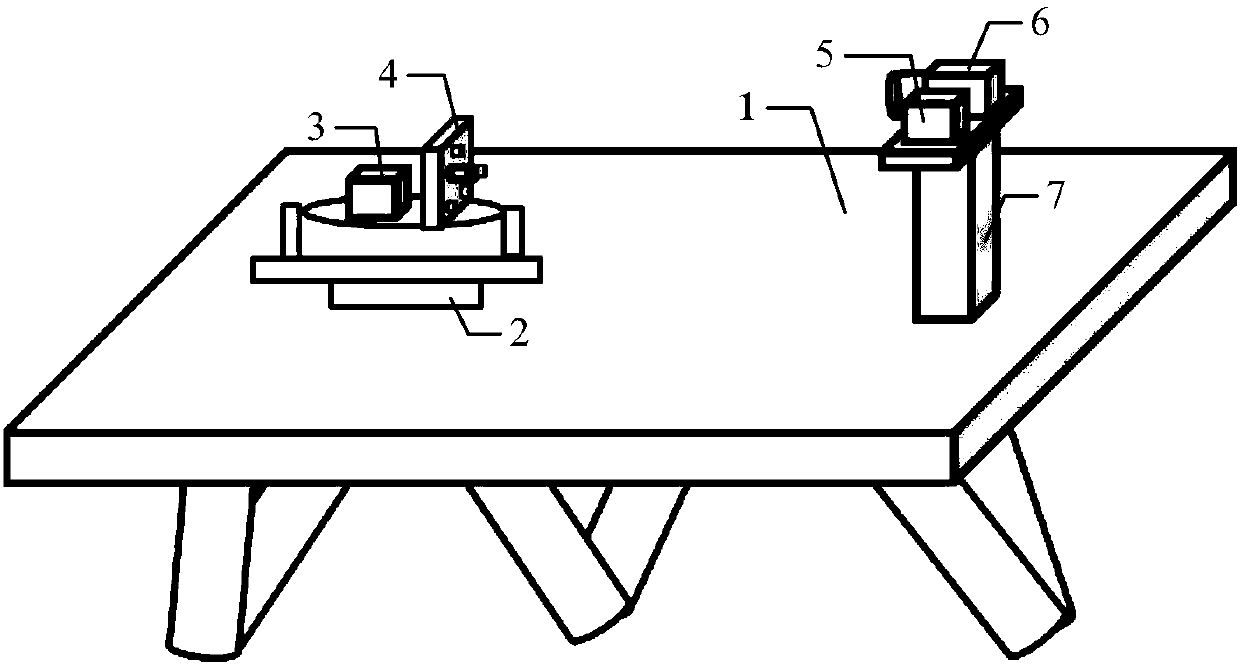
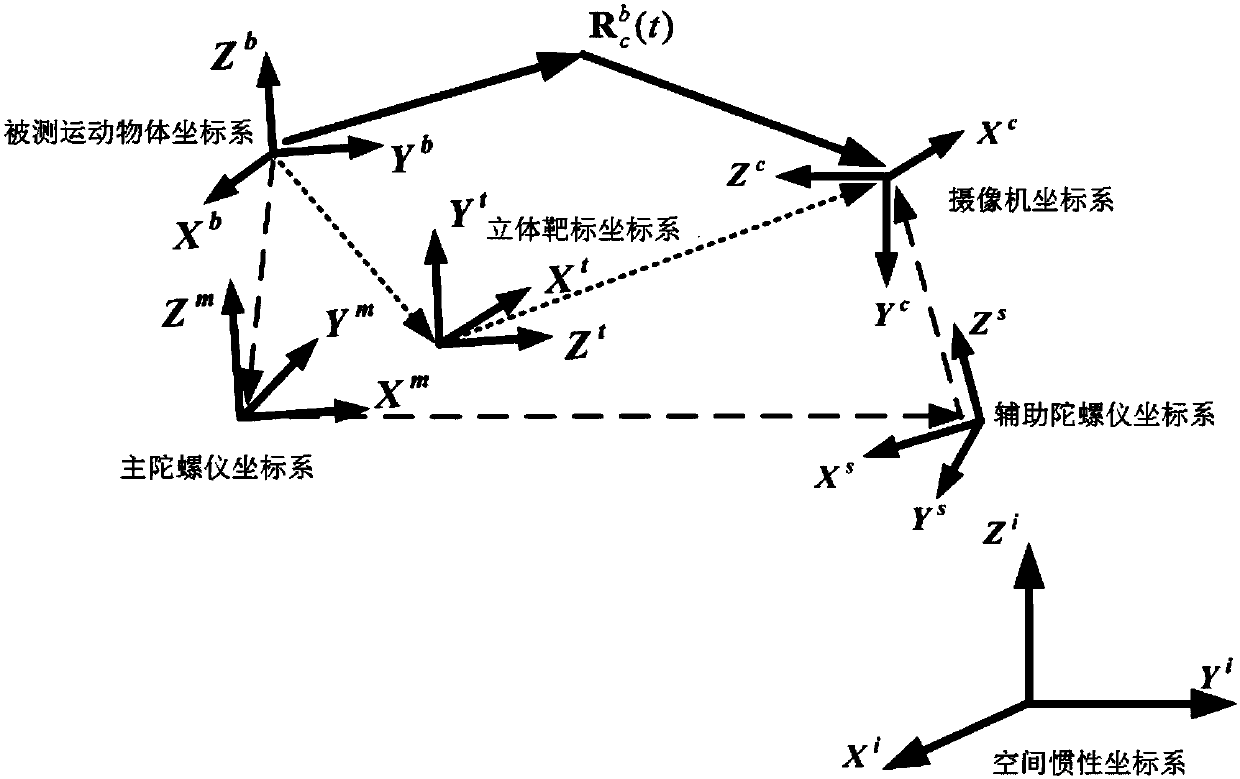
[0052] The present invention will be further described below in conjunction with the accompanying drawings.
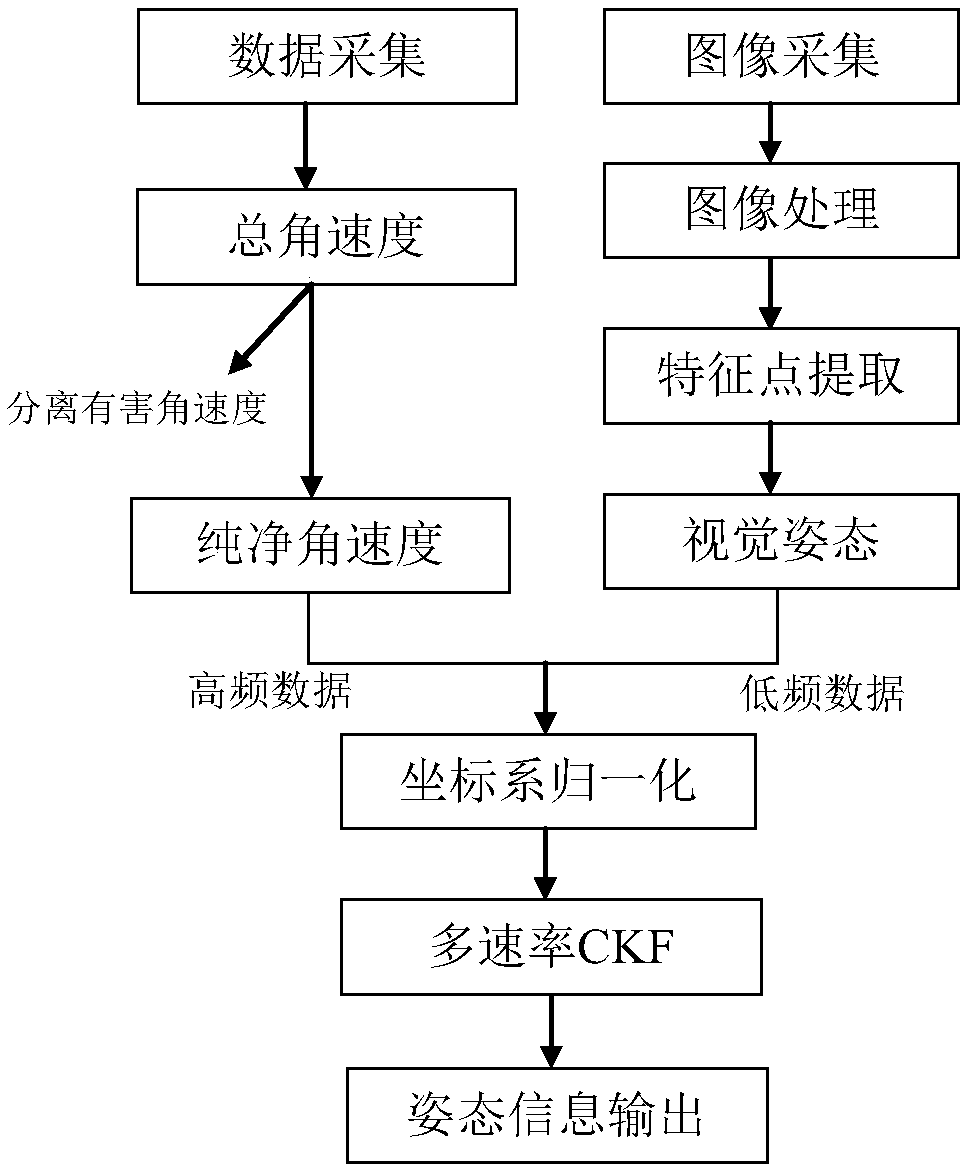
[0053] The method adopted in the present invention is to add an auxiliary inertial device installed on the carrier. The auxiliary gyroscope senses the motion information of the carrier, and then obtains the pure angular velocity information through the differential method and uses it for further relative attitude calculation. Visual and inertial data are usually fused using nonlinear Kalman filtering methods. Under nonlinear conditions, the volumetric Kalman filter (Cubature Kalman Filter, CKF) works best in the Gaussian filter domain. Therefore, this program uses CKF to fuse visual and inertial data. In the visual and inertial combined measurement system, there is a problem of inconsistent device sampling frequency, and usually the visual sensor has a low sampling frequency, while the inertial device has a high sampling frequency. In order to solve the problem of i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More