

Wearable lower limb exoskeleton rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the field of rehabilitation robots, can solve the problems of heavy weight, no assistance, and difficulty in adapting the size of the exoskeleton to achieve the effect of light weight and reduced motor load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below in conjunction with the accompanying drawings.
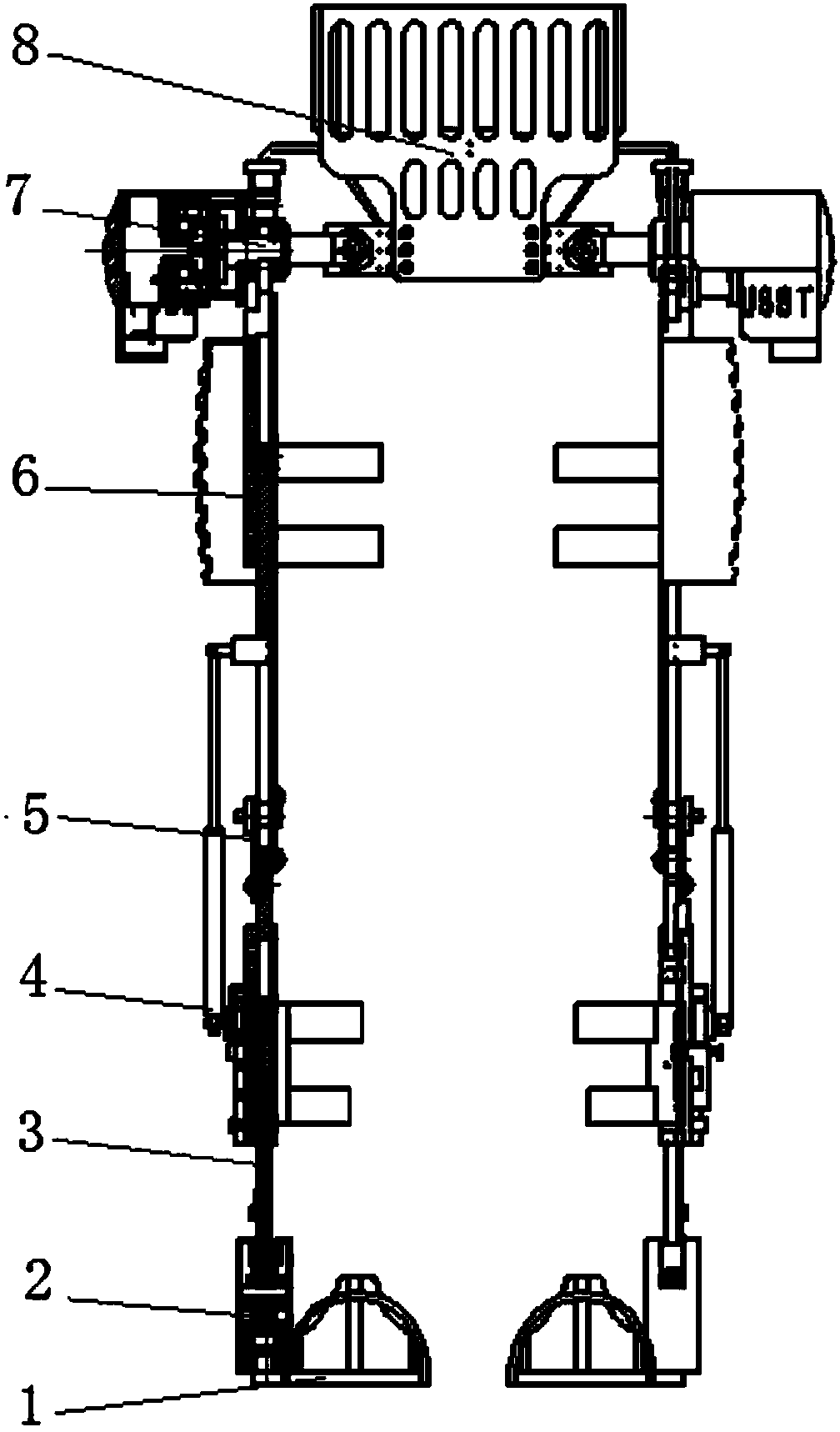
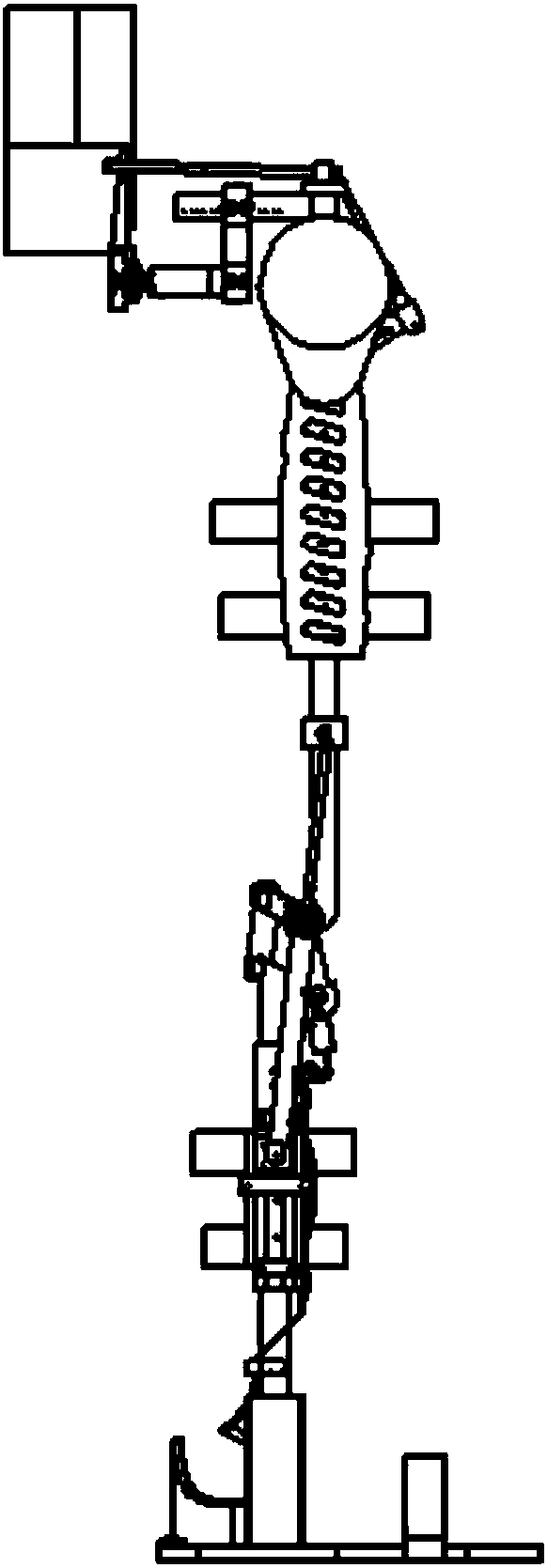
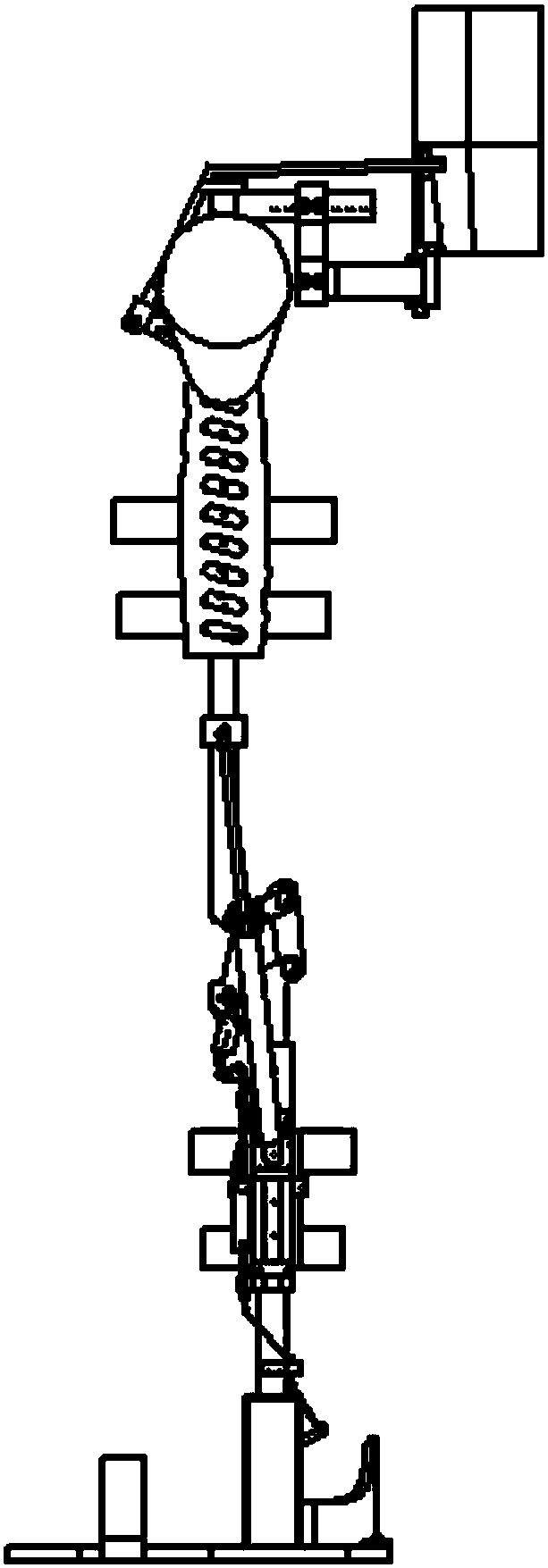
[0032] Such as Figure 1 to Figure 12 As shown, the novel wearable lower extremity exoskeleton rehabilitation robot of the present invention includes a foot assembly 1, an ankle assembly 2, a calf assembly 3, an air spring assembly 4, a knee assembly 5, a thigh assembly 6, a hip assembly 7, a back Component 8.
[0033] Both sides of the back assembly 8 are respectively connected to the thigh assembly 6 through the hip joint assembly 7, each thigh assembly 6 is connected to the lower leg assembly 3 through the knee joint assembly 5, the lower leg assembly 3 is connected to the foot assembly 1 through the ankle joint assembly 2, and the thigh assembly 6 A gas spring assembly 4 is connected with the lower leg assembly 3 . The hip joint assembly 7 includes a motor 71 , a harmonic reducer 72 , an output shaft 73 , a key 74 , a vertical pin shaft 75 , and a vertical pin ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More