Joint track with posture adjusting mechanism
A technology for adjusting mechanism and attitude, which is applied in the directions of tracked vehicles, motor vehicles, transportation and packaging, etc., can solve problems such as affecting the normal operation of the mobile robot mobile platform, unable to absorb the impact load of ground obstacles, affecting the grounding performance of the crawler assembly, etc. Achieve the effect of improving the crawler ground adhesion, simple structure and reasonable force on parts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Below in conjunction with accompanying drawing, content of the present invention is described in further detail as follows:
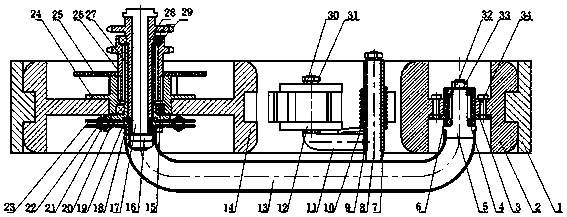
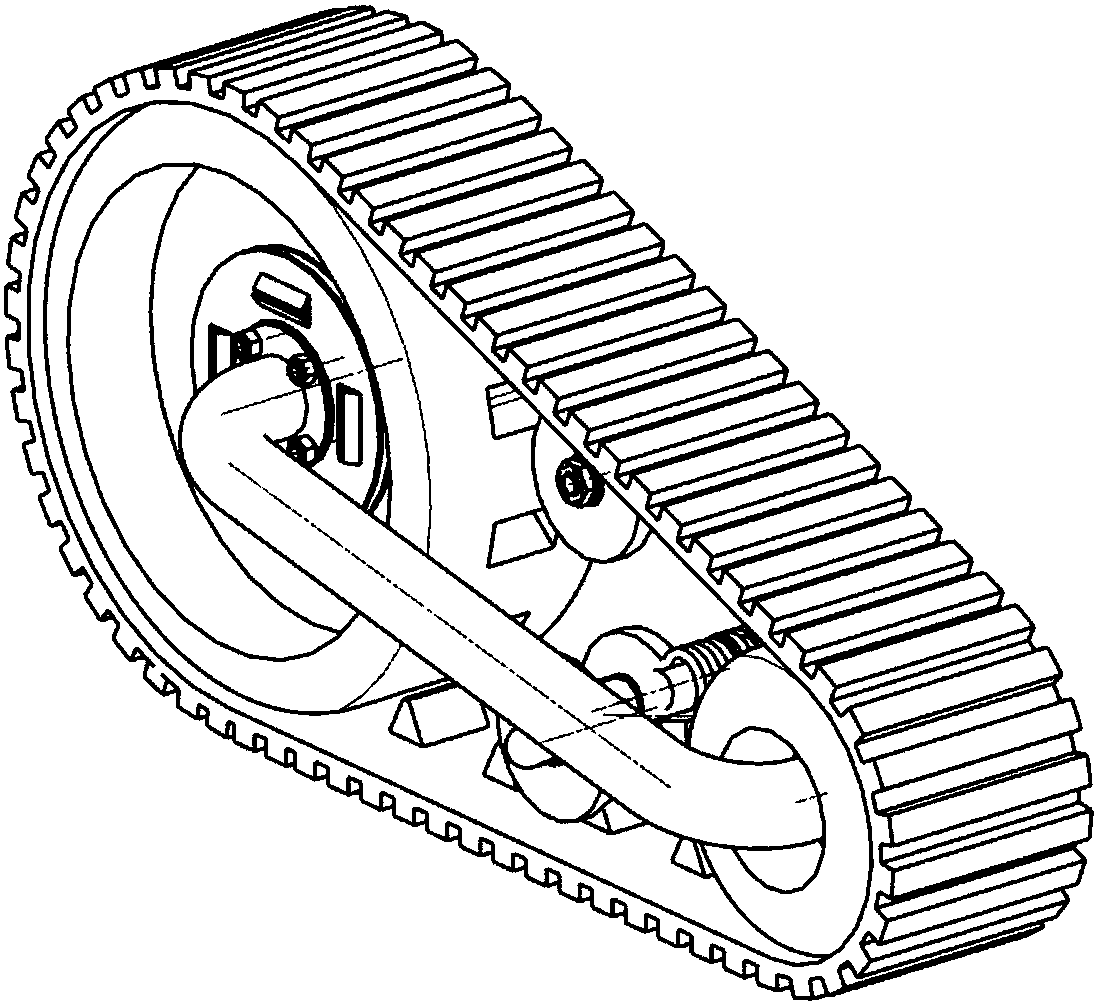
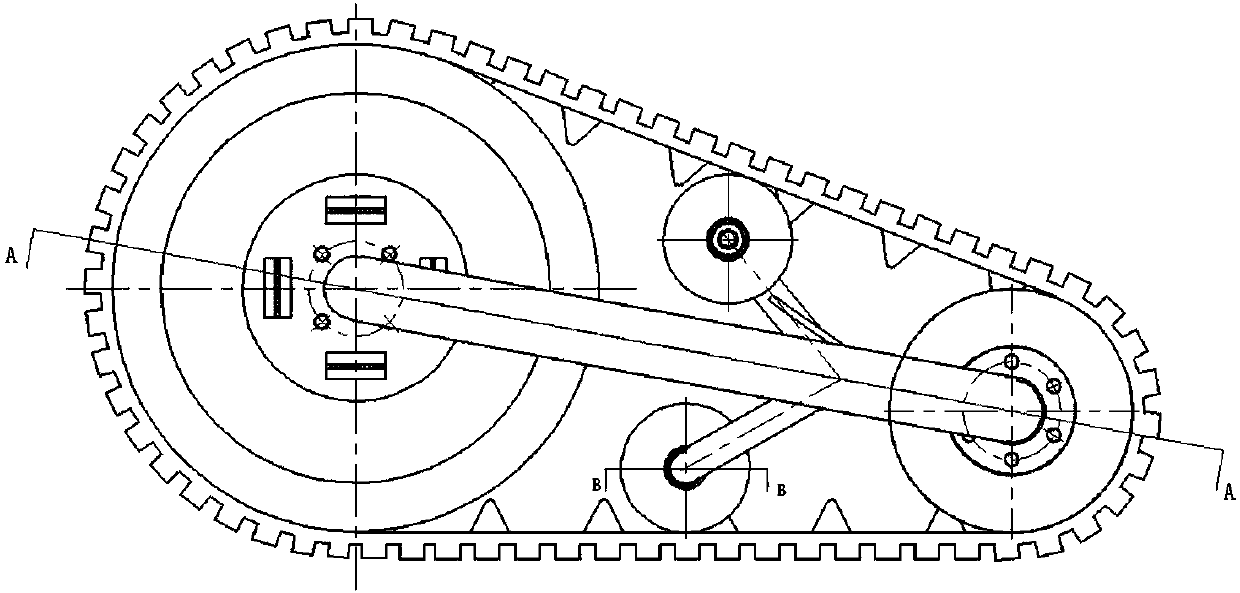
[0042] A articulated track with an attitude adjustment mechanism,
[0043] On the bull wheel rotating shaft 17, a drive hollow shaft 26 with a chain disc at one end is sleeved,
[0044] Drive the hollow shaft 26 to drive the big wheel 14 to rotate, move the track 1 to run, and drive the small wheel 2 to rotate. It is characterized in that:
[0045] Between the big wheel rotating shaft 17 and the driving hollow shaft 26, a hollow shaft 28 for attitude adjustment with a chain disc at one end is sleeved, and the three coaxial axes can rotate mutually; turn each other.
[0046] The insertion end of the attitude adjustment hollow shaft 28 is connected to the rod-shaped swing arm 13 through the torque damping mechanism, and the other end of the swing arm 13 is rotated to connect the small wheel 2; The lines are consistent; the reciprocating swing of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com