

Route generator, route generation method, and route generation program
A technology of path generation and generation department, which is applied in the directions of measuring devices, control devices, transportation and packaging, etc., which can solve the problems of heavy computing load and various computing parameters, and achieve the effect of reducing the burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
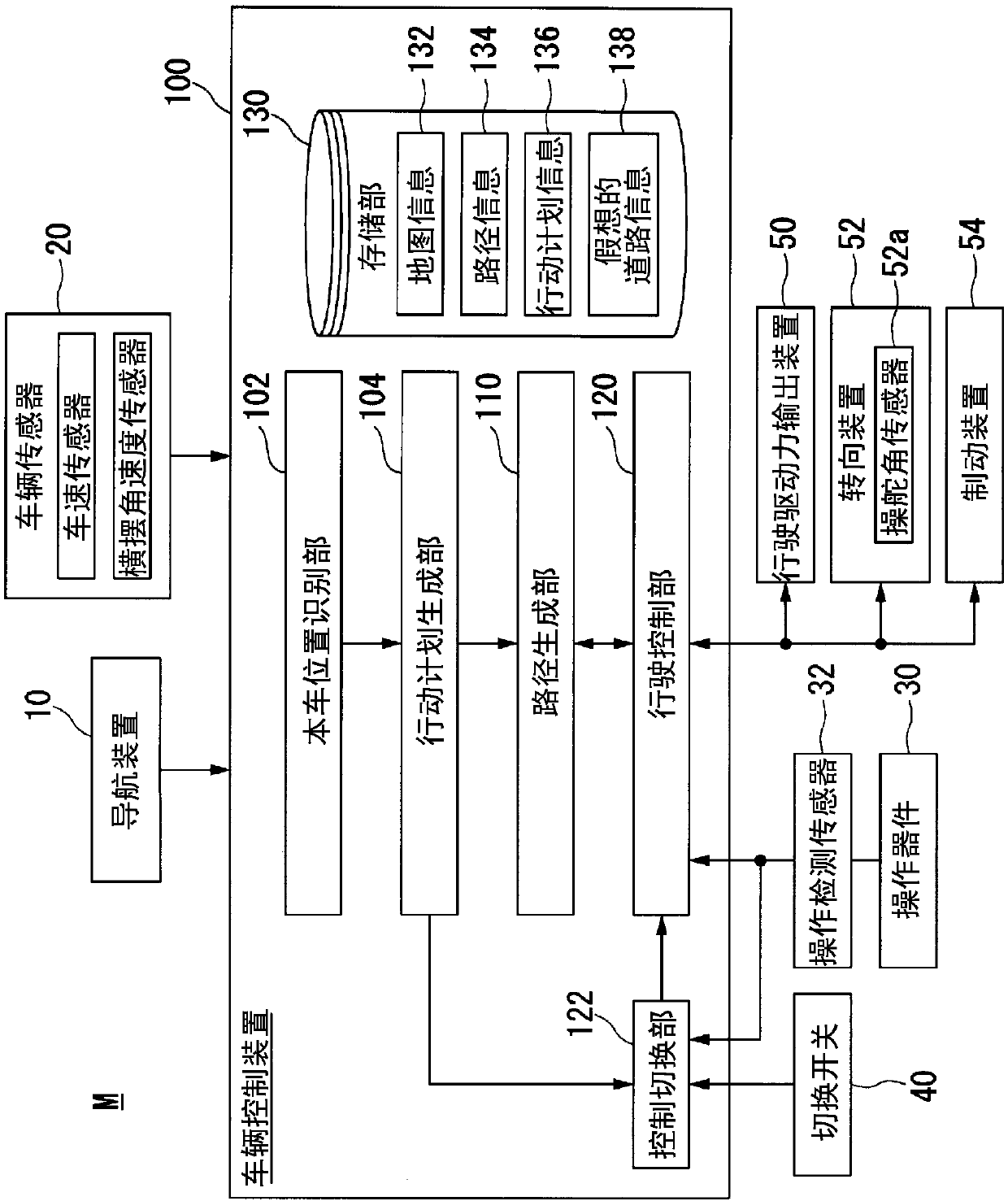
[0053] figure 1 It is a functional configuration diagram of the host vehicle M centered on the vehicle control device 100 of the first embodiment. The own vehicle M refers to a vehicle on which the vehicle control device 100 is mounted. The vehicle M is equipped with a navigation device 10 , a vehicle sensor 20 , an operating device 30 , an operation detection sensor 32 , a switch 40 , a driving force output device 50 , a steering device 52 , a braking device 54 , and a vehicle control device 100 .
[0054] The navigation device 10 includes a GNSS (Global Navigation Satellite System) receiver, map information (navigation map), a touch-panel display device functioning as a user interface, a speaker, a microphone, and the like. The navigation device 10 specifies the position of the host vehicle M using a GNSS receiver, and derives a route from the position to a destination designated by the user. The route derived by the navigation device 10 is defined by a combination of link...
no. 2 approach
[0121] Hereinafter, a second embodiment will be described. The vehicle control device 100A in the second embodiment is different from the first embodiment in that, when there is an object that hinders the running of the own vehicle M, the own vehicle M is controlled under constraints corresponding to the curvature of the road. drive. The following description will focus on such differences.
[0122] Figure 12 It is a diagram showing components of a host vehicle M equipped with a vehicle control device 100A according to the second embodiment. Such as Figure 12As shown, the host vehicle M is equipped with a navigation device 10 , sensors 60 - 1 to 60 - 7 , radars 70 - 1 to 70 - 6 , sensors such as a camera 80 , and a vehicle control device 100A.
[0123] The detectors 60 - 1 to 60 - 7 are, for example, LIDAR (Light Detection and Ranging, or Laser Imaging Detection and Ranging) that measure the distance to the object with respect to scattered light of the irradiated light. ...
no. 3 approach
[0175] Hereinafter, a third embodiment will be described. The vehicle control device 100B of the third embodiment differs from the first and second embodiments in that, when an obstacle OB exists on the road, the generated trajectory Tg# is considered to be a virtual transformation of its shape. The size of the obstacle OB. The following description will focus on such differences.
[0176] The conversion unit 112 of the third embodiment converts the shape of the road into a straight line when the outside world recognition unit 103 recognizes an obstacle OB on the own lane, and converts the shape of the obstacle OB on the road into a straight line. convert. For example, the shape of the obstacle OB is the above Figure 15 In the case of a circle as shown, the shape of the road is transformed into a linear shape, and the side close to the reference point P is converted to expand in the X direction, which is the traveling direction of the vehicle, and the side farther from the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More