

Feature point line-based monocular camera pose estimation and optimization method and system
A technology for pose estimation and optimization methods, which is applied in computing, image analysis, instruments, etc., and can solve problems such as low accuracy, ineffectiveness, and inefficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0053] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
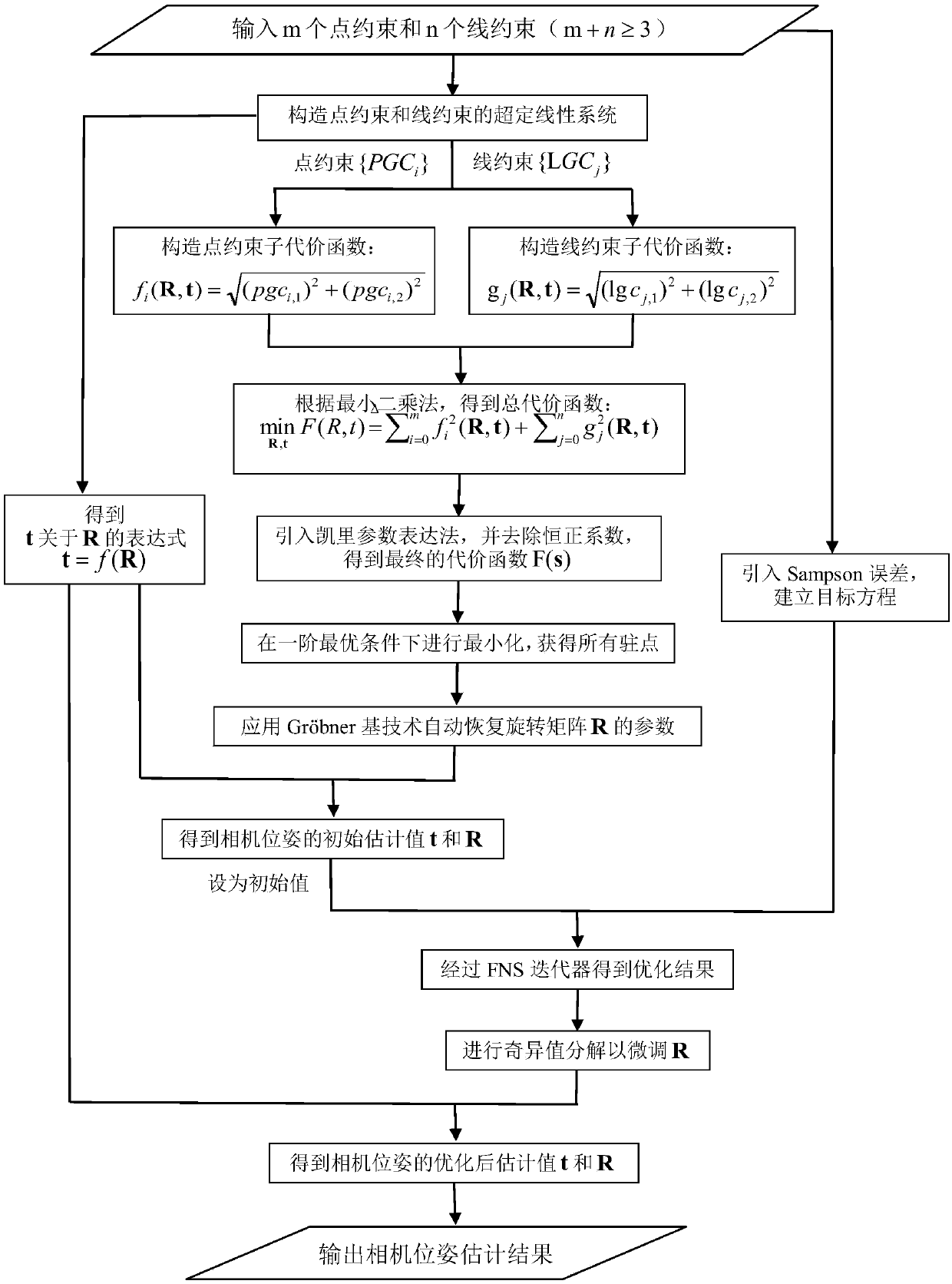
[0054] See figure 1 , the monocular camera pose estimation and optimization method based on feature points and feature lines of the present invention, the specific steps are as follows:
[0055] Step 1. Establish the geometric constraints of feature points and feature lines, and construct a cost function accordingly, and use the cost function to solve the initial rotation matrix and translation vector of the camera pose.
[0056] This step includes the following sub-steps:
[0057] Step 101, establishing geometric constraints in the form of a matrix of feature points and feature lines, ie, point constraints and line constraints.
[0058] From the geometric constraints of three points collinear and intersecting lines coplanar between the photo and the space, the required point constraints and line constraints can be ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More