

Aircraft robustness non-linear control method and robustness controller system
A nonlinear control and control system technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve problems such as failure to fully consider highly nonlinear, multiple uncertain robust control, etc. , to achieve the effect of shortening the convergence time and reducing the conversion of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
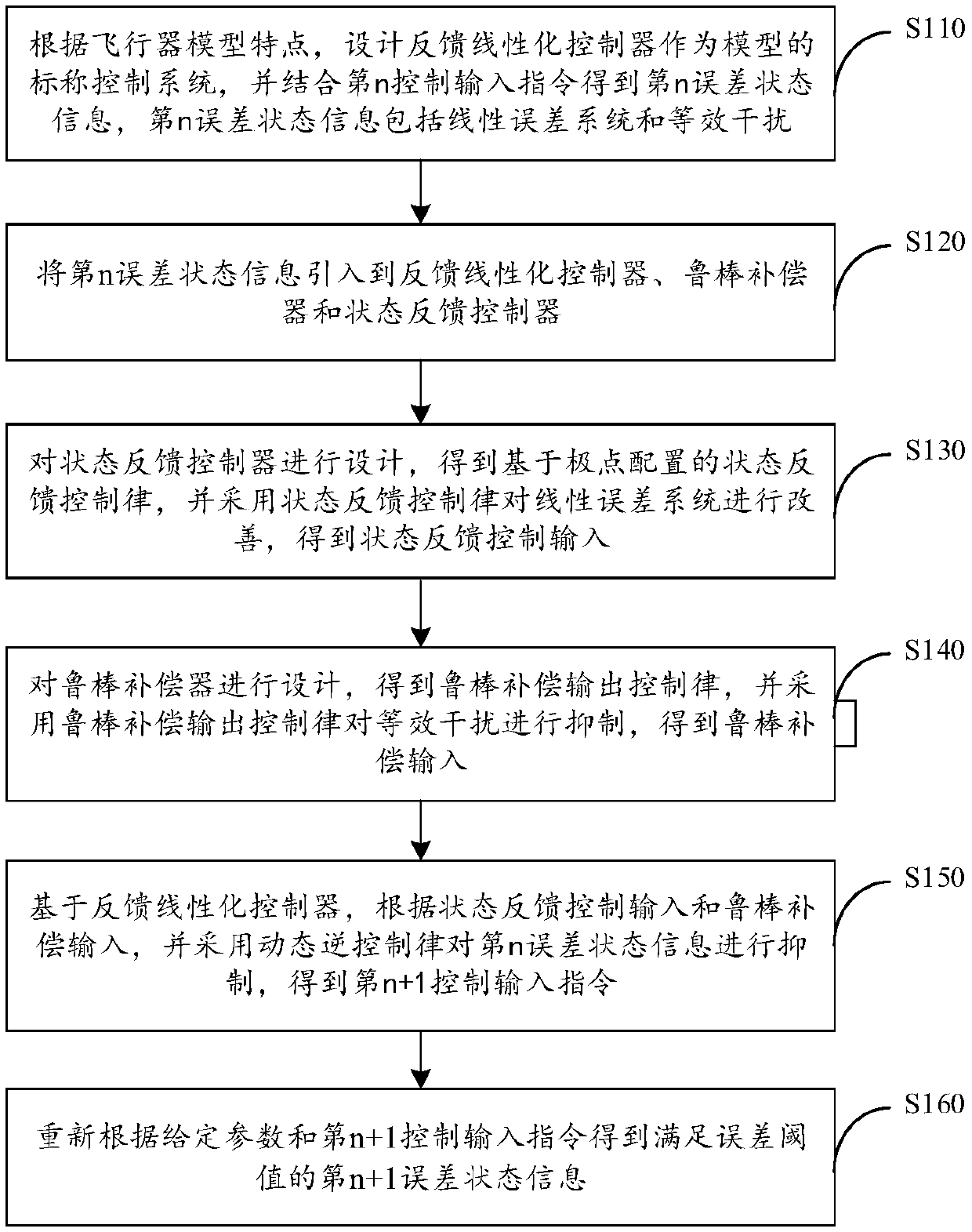
[0070] figure 1 It is a flowchart of a robust nonlinear control method for an aircraft provided in the first embodiment of the present invention.
[0071] Reference figure 1 The robust nonlinear control method of aircraft includes the following steps:
[0072] Step S110, obtaining the nth error status information according to the given parameter and the nth control input command;
[0073] Step S120, introducing the nth error state information into the feedback linearization controller, the robust compensator and the state feedback controller;
[0074] Step S130: In the state feedback controller, the state feedback control law is adopted to suppress the nth error state information, and the state feedback control input is obtained;
[0075] Step S140, in the robust compensator, the robust compensation output control law is adopted to suppress the nth error state information to obtain the robust compensation input;
[0076] Step S150, in the feedback linearization controller, according to...
Embodiment 2
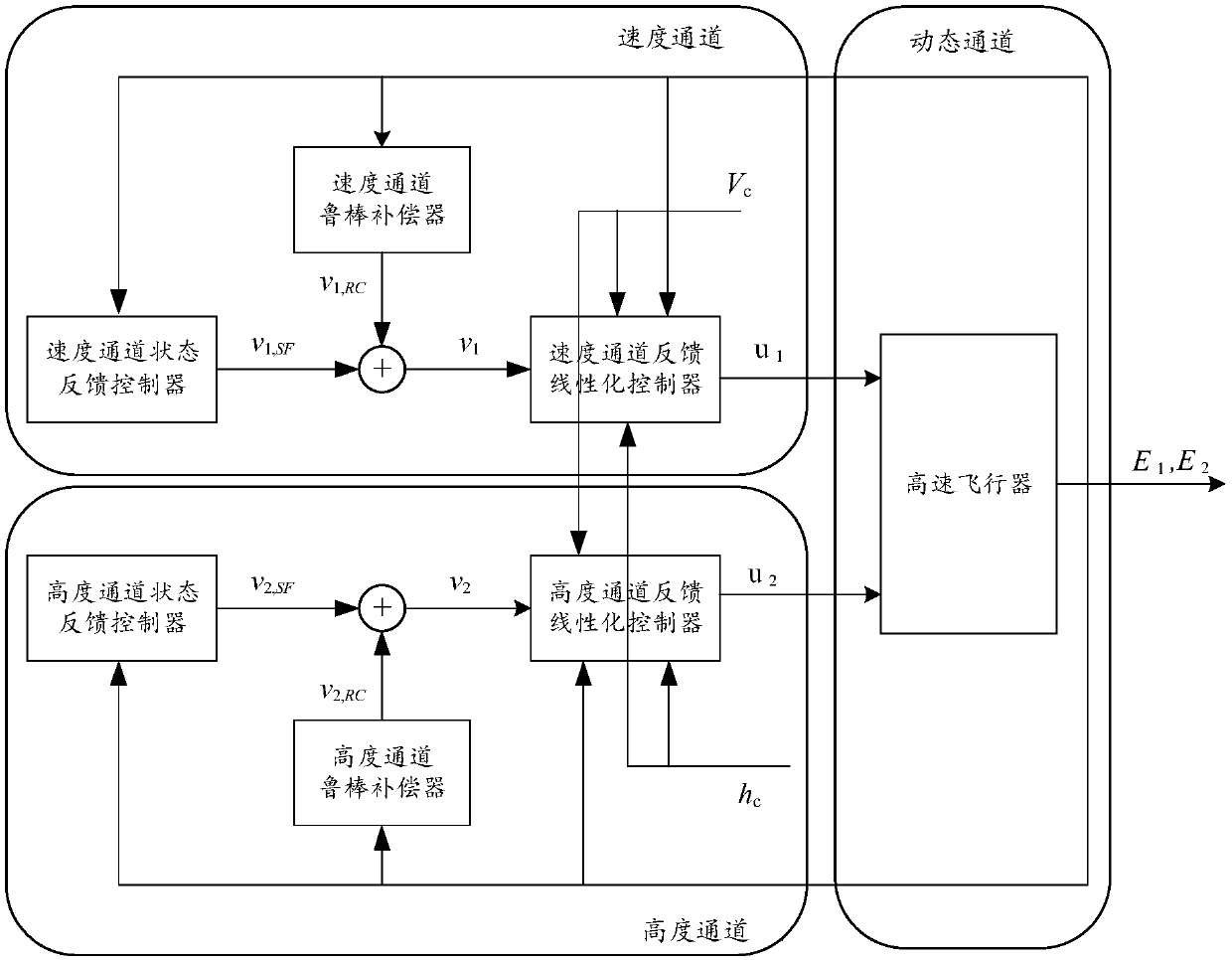
[0151] figure 2 It is a schematic diagram of the robust controller system provided in the second embodiment of the present invention.
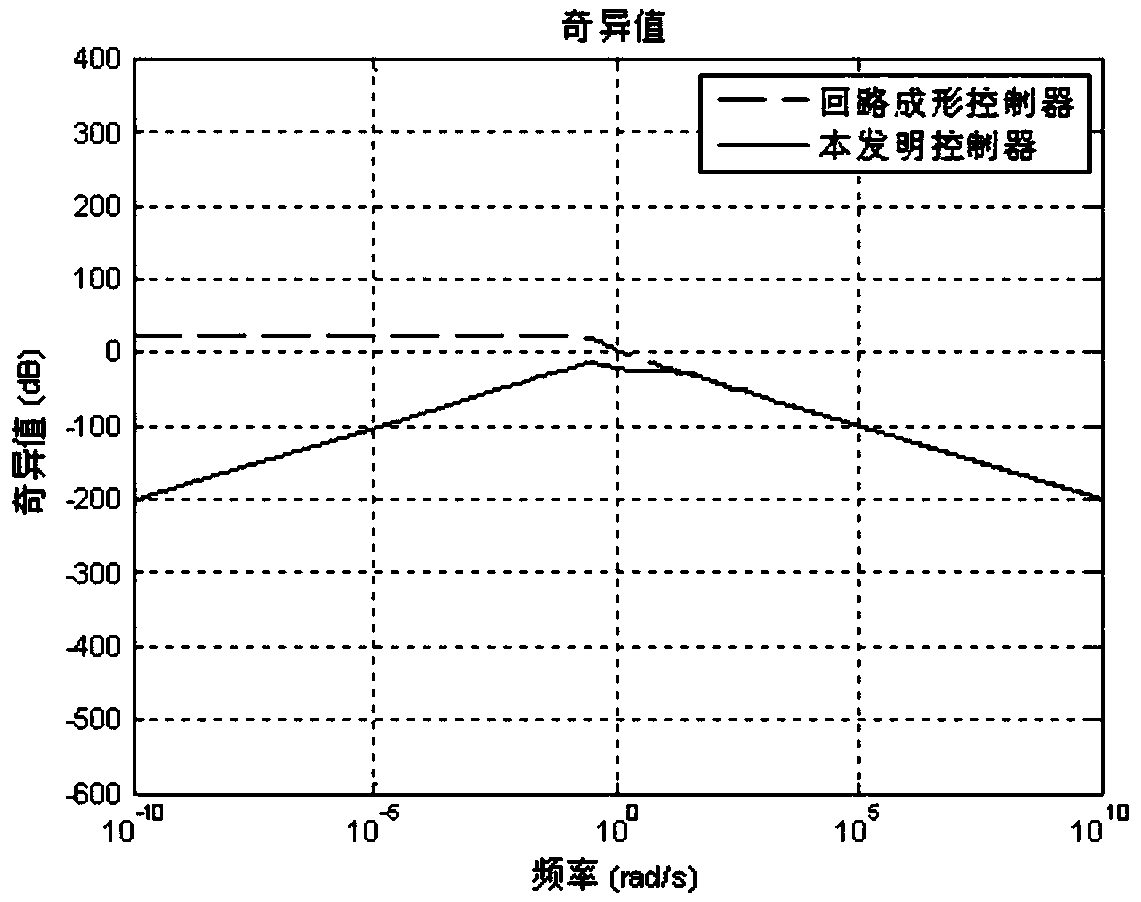
[0152] This embodiment is a simulation verification of the robust controller system.
[0153] Such as figure 2 As shown, the robust controller system includes: a high-speed aircraft arranged in a dynamic system, a speed channel feedback linearization controller arranged in a speed channel, a speed channel robust compensator and a speed channel state feedback controller, and a speed channel state feedback controller arranged in The height channel feedback linearization controller, the height channel robust compensator and the height channel state feedback controller in the height channel;
[0154] The high-speed aircraft feeds back state error information to the speed channel and the high-speed channel respectively, and the speed channel state feedback controller, the speed channel robust compensator, and the speed channel feedback linearization con...
Embodiment 3
[0163] Figure 13 It is a schematic diagram of a robust controller system provided in Embodiment 3 of the present invention.
[0164] Reference Figure 13 The robust controller system includes the following units:
[0165] The first error output unit 100 is configured to obtain the nth error status information according to the given parameter and the nth control input command;
[0166] The introduction unit 200 is used to introduce the nth error state information to the feedback linearization controller, the robust compensator and the state feedback controller;
[0167] The first suppression unit 300 is used for suppressing the nth error state information in the state feedback controller by using a state feedback control law to obtain a state feedback control input;
[0168] The second suppression unit 400 is configured to use a robust compensation output control law to suppress the nth error state information in the robust compensator to obtain a robust compensation input;
[0169] The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More