

A method of robot shaking suppression
A vibration suppression and robot technology, applied in the direction of instruments, adaptive control, general control system, etc., can solve problems such as robot end vibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
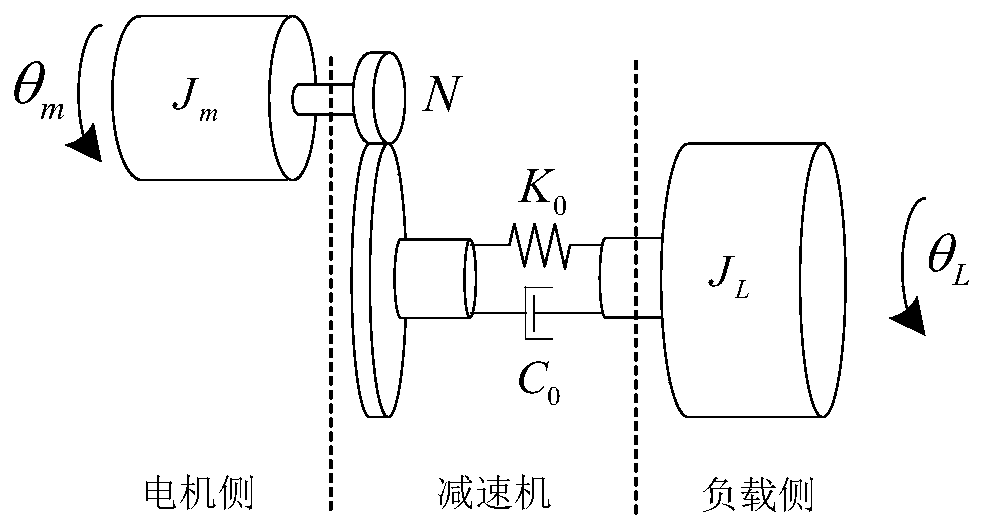
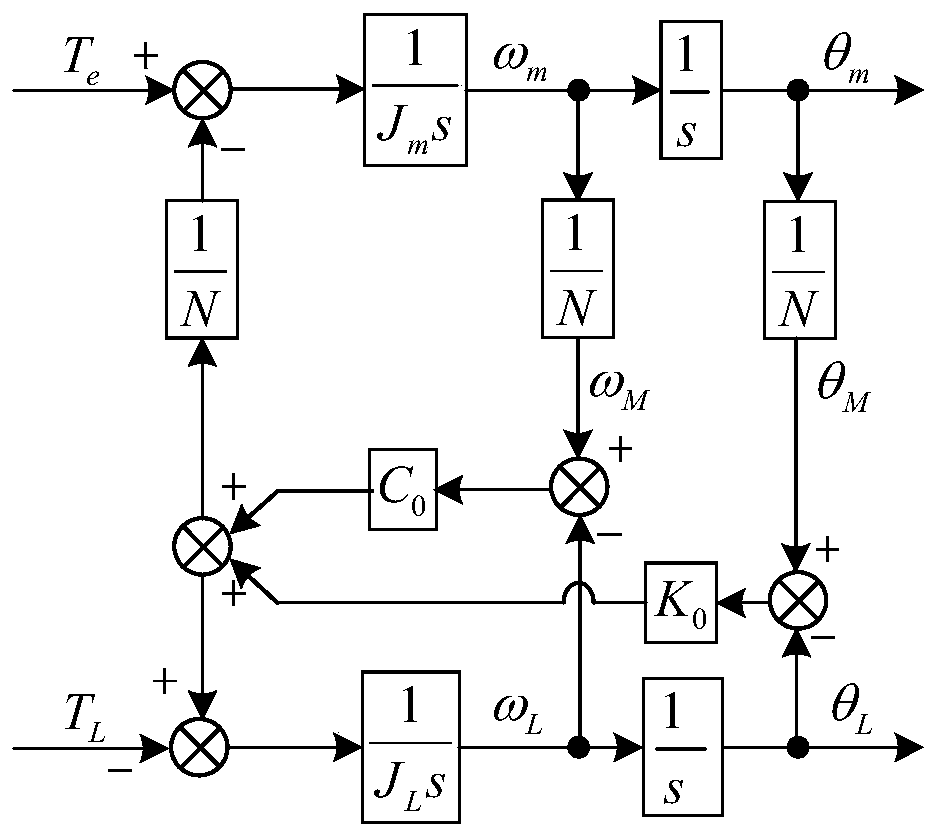
[0056] The implementation of the present invention takes a six-joint series industrial robot as an example. Each joint of the robot is controlled separately, and the shaking suppression method of the present invention is used on each joint respectively. In order to simplify the description of the vibration suppression effect, the first joint among the six joints is taken as an example. This robot joint uses a harmonic reducer as the transmission mechanism. The reduction ratio of the reducer is 121, and the stiffness coefficient is 87×10 4 Nm / rad, the damping coefficient is 15Nm / (rad / s).
[0057] Taking a section of the path in the continuous working process of the robot as an example, the path is Figure 4 From A to B in , the action path planning is that the first joint of the robot moves from -14.836° to 7.320° within 0.8s, and the original given joint position, joint velocity, and joint acceleration are as follows: Figure 4 shown.
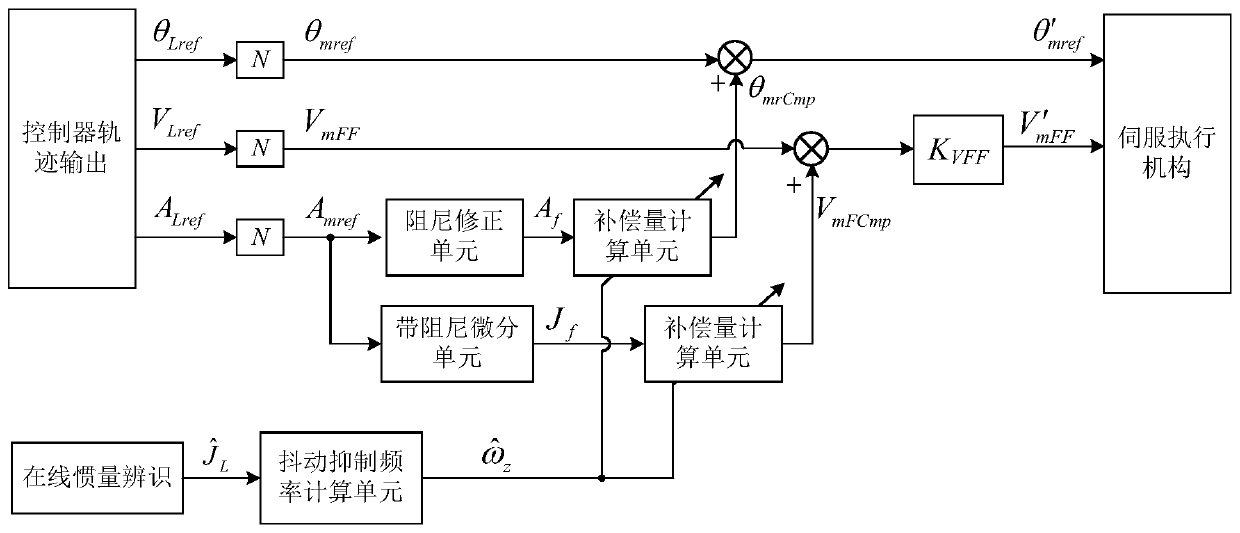
[0058] Step 1: The output of the con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More